

摘要:随着机器人技术的迅猛发展,路径规划作为机器人自主导航中的核心问题之一,已经引起了广泛的研究关注。传统的二维路径规划方法在许多实际应用中已不再适用,尤其是在复杂的三维环境中,路径规划面临着更多的挑战,如地形复杂性、障碍物多样性以及路径的优化等问题。因此,三维路径规划方法成为了当前研究的热点。
作者信息
编号:MP-15
大小:4K
作者:Bob(原创)
项目概述
三维路径规划是自主机器人与无人机在复杂空间环境中实现自主导航的关键技术之一。面对三维地形中障碍物形态复杂、环境建模难度大以及路径可行性判定要求高等问题,本文设计并实现了一种基于概率路图(Probabilistic Roadmap, PRM)与 A* 算法相结合的三维路径规划方法。该方法采用随机高斯函数叠加生成仿真三维山峰地形,通过 MATLAB 构建相应的三维栅格高度场模型。在三维空间中利用随机采样获得候选节点,并依据可行性判定函数筛除与地形发生冲突的节点,进而构建可行节点集合。在此基础上,通过路径段碰撞检测方法评估任意两节点之间连线的可行性,从而构建无向概率路图。A* 搜索算法在该路图上执行最优路径求解,以历史代价与启发式代价作为综合评价指标,实现起点至终点的最短可行路径规划。
基于 MATLAB 的实验结果表明,该方法能够在复杂三维高度场中生成连续、可行且代价较低的空间路径,有效避免地形碰撞并保持良好的计算效率。节点可行性判定与路径段碰撞检测策略显著提高了路径规划的鲁棒性与可靠性。研究结果表明,本文提出的基于 PRM 与 A* 的三维路径规划方法在复杂空间环境中的自主导航任务中具有良好的应用潜力。
系统设计
本系统采用“地形建模 + 随机采样建图(PRM)+ A* 搜索规划”的整体架构,在 MATLAB 平台上实现三维复杂地形环境下的路径可行性判定与最优路径求解。
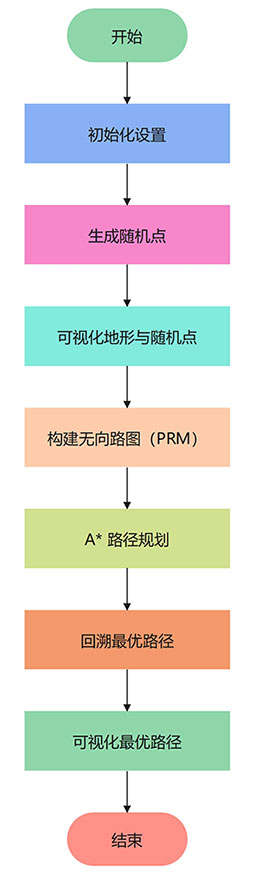
图1 系统整体流程图
硬件配置
该系统硬件配置如上,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
表1 惠普(HP)暗影精灵10台式整机配置(系统硬件配置)
软件环境
对本实验所需的各类软件及工具的基本信息进行了清晰汇总。

表2 系统软件配置(真实运行环境)
运行展示
运行main.m
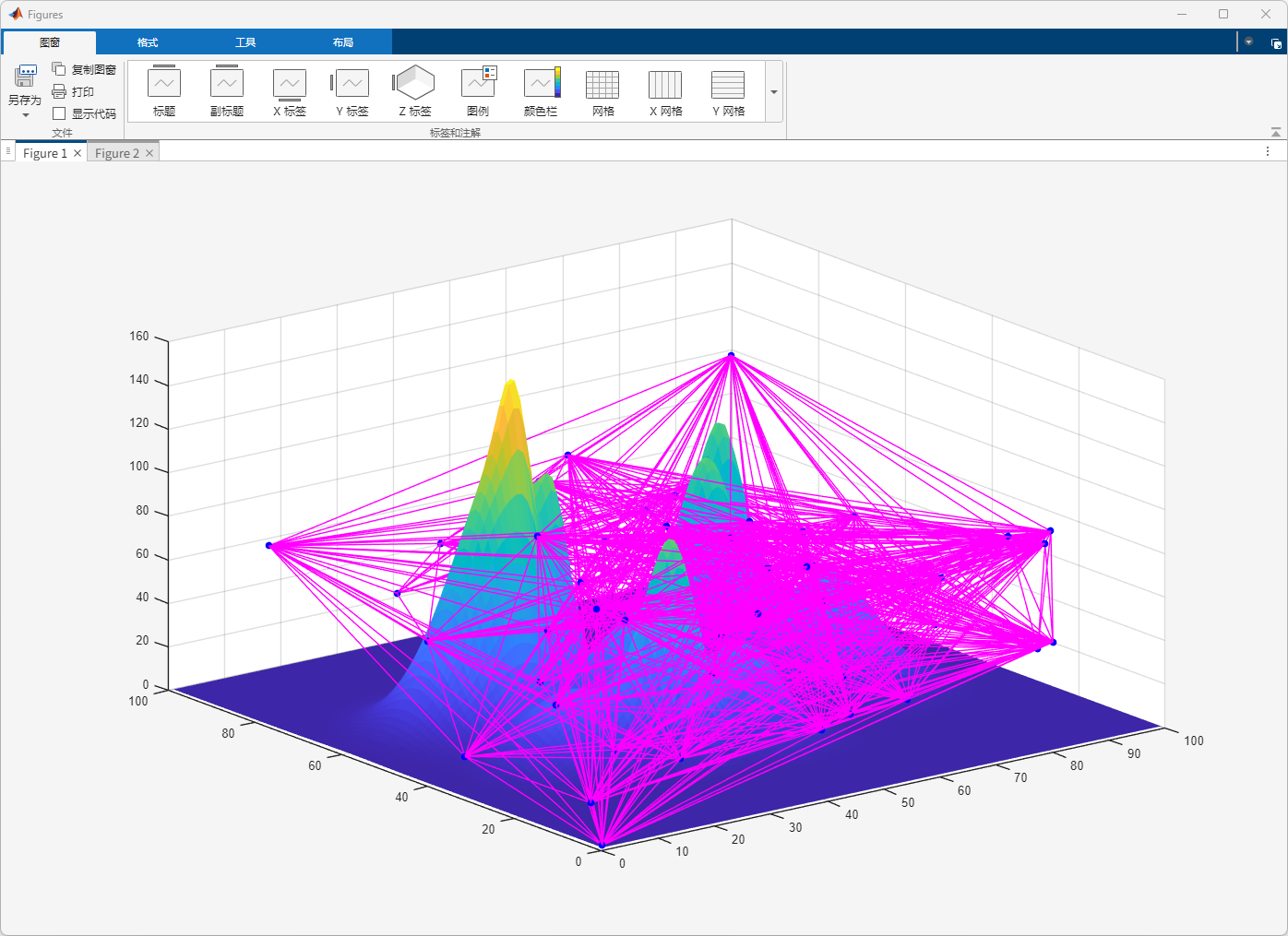
图2 三维路径规划PRM图与节点连接可视化
该图展示了在三维山峰地形上的路径规划过程,包含了多个随机采样点(蓝点)以及这些点之间的连线(洋红色)。这些连线代表了通过概率路图(PRM)算法连接的可行路径。地形本身通过三维曲面呈现,显示了障碍物的分布和起点到终点的路径规划网络。
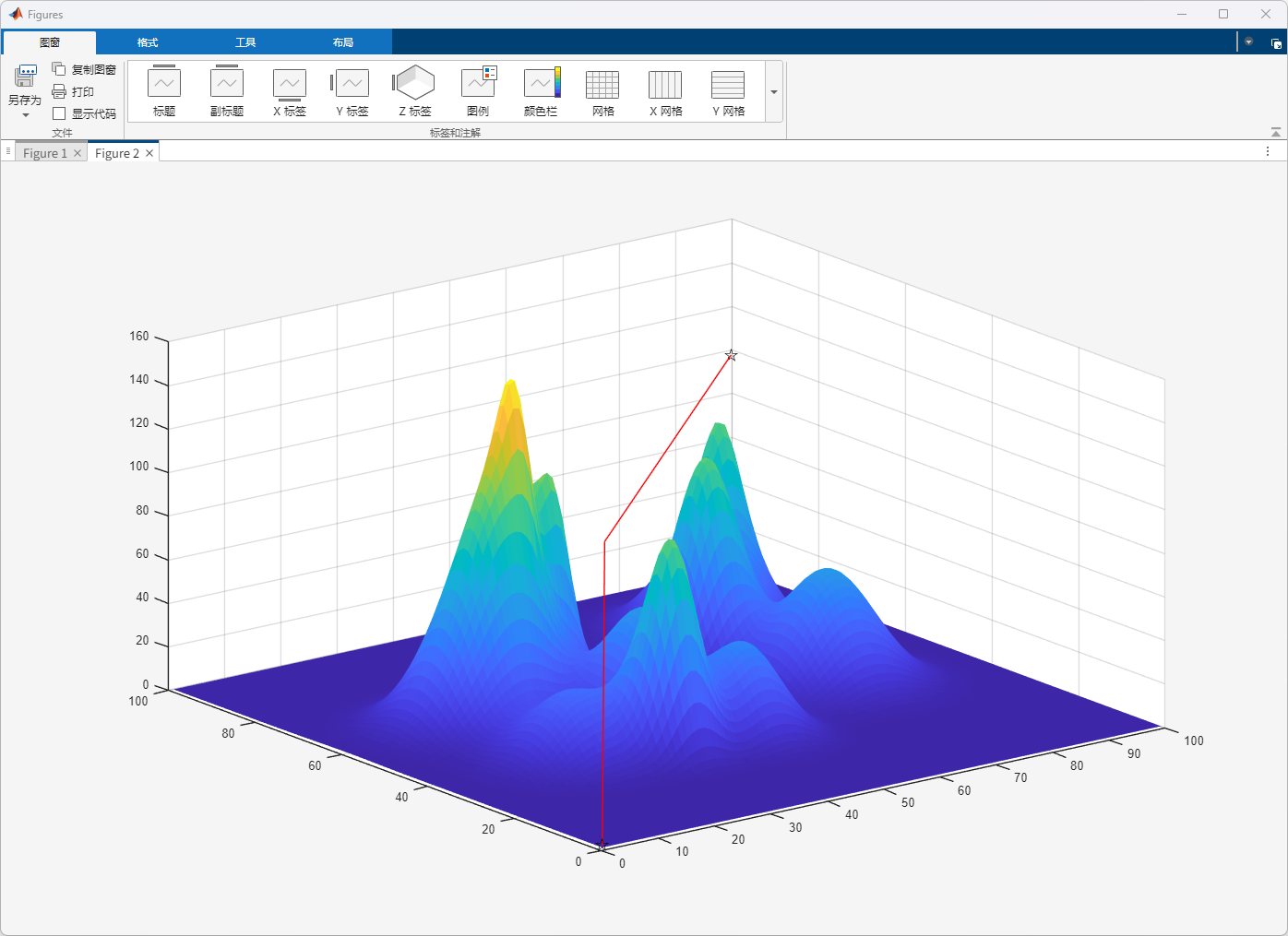
图3 A*算法最短路径规划与地形可视化
该图展示了基于 A* 算法的路径规划结果。红色线段表示从起点到终点的最短路径,穿越了地形的多个山峰。该图形还突出显示了三维地形模型,反映了路径如何避开高峰并选择平坦的地形区域,确保路径的可行性与最优性。
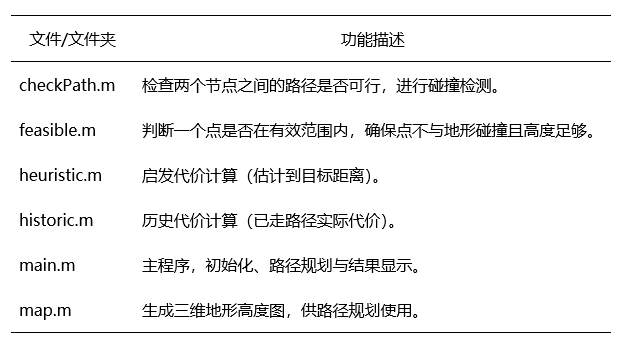
文件清单
本项目的文件清单如下所示:
拓展服务
我们为有进一步需求的用户提供以下有偿拓展服务,包括但不限于:
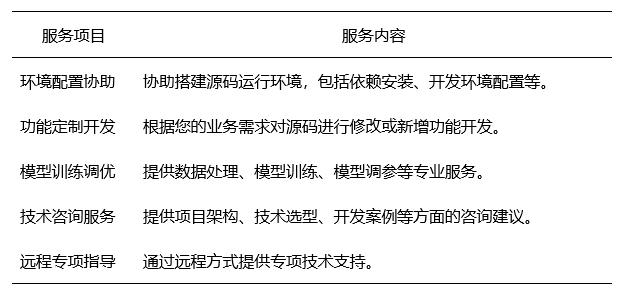
温馨提醒:上述服务均为有偿服务。我们会根据您的实际需求、项目规模与技术复杂度,提供对应的方案评估与费用报价,在充分沟通后再开展具体工作。若您有环境搭建、功能开发、模型训练或远程指导等需求,欢迎先与我们联系,我们将尽量在预算与效果之间为您找到合适的平衡方案。
评论(0)