
在智能交通与驾驶安全领域,安全带和头盔检测看似常见,却比想象中棘手得多:安全带又细又长,在图像里常常只有几像素宽;头盔则经常被发型、帽檐、遮阳板遮挡。再加上“违规样本”远少于“合规样本”的长尾分布,以及昼夜、雨雾、逆光等复杂环境交替,结果就是:即便是表现优异的 YOLO 系列,也很容易出现召回不足、边框不准、鲁棒性不够的问题。
YOLOv11 虽然在特征提取和效率上已经更强,但想在小目标 + 遮挡场景中打出真正的优势,还得靠“动手改造”。本文就结合近两年的研究与落地经验,总结了一条高性价比、可复现的提效路线:从 结构优化(P2、BiFPN) 到 注意力机制(ECA、RFCBAM),从 SIoU + Soft-NMS 到 检测+分割、多任务蒸馏,再配合小目标友好增强与类重加权。最后,我会附上最小复现实验清单和配置示例,让你能在实际项目中快速验证增益,实测可达 +4% ~ +9% mAP。
一、局视角:YOLOv11 改造地图
先来看一张“全景航拍图”:
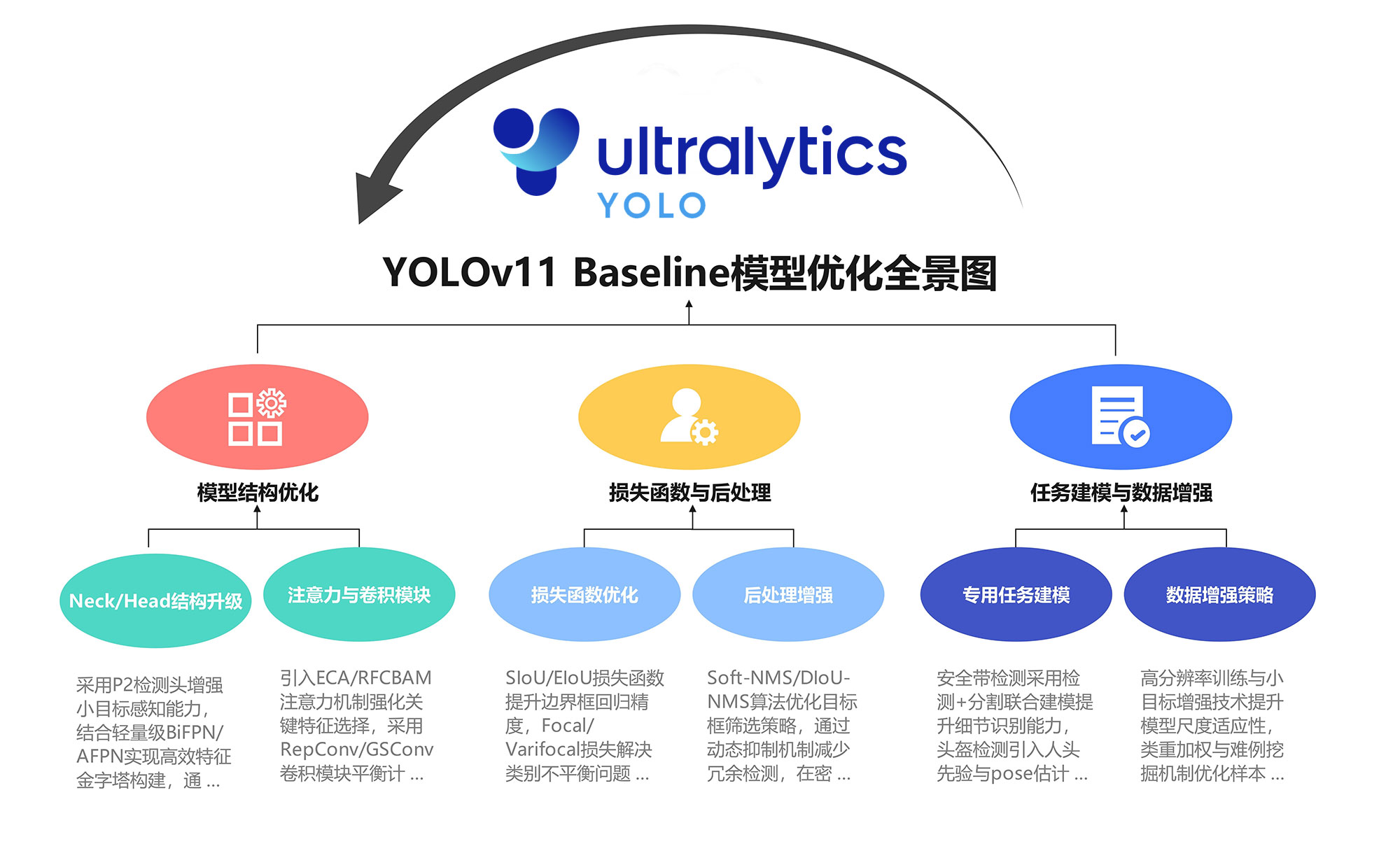
YOLOv11 是中心,所有优化手段都像是向外延伸的“分支路线”:
结构优化:加 P2 层、轻量化 BiFPN 融合特征
注意力机制:ECA、RFCBAM 等轻量注意力模块
损失与推理:SIoU、Soft-NMS 提升召回与定位
任务建模与数据:检测 + 分割、多任务蒸馏、小目标友好增强与类重加权
这四个方向层层叠加,最终目标就是:再复杂的场景,也不漏掉一条安全带,不错过一顶头盔。
二、结构优化:给小目标更多舞台
YOLOv11 默认的检测层是 P3–P5,但对于只有几像素宽的小目标,感受野往往过大,细节被淹没。
(1)新增 P2 检测层:让模型更早地“盯住”细粒度特征。
(2)轻量 BiFPN:替换原有 PAN/FPN,提升特征融合的有效性,让 P2–P5 信息共享更高效。
这一改造在安全带检测中尤其显著,mAP 小目标子集提升可达 +3%。
三、注意力机制:让模型聚焦关键线索
安全带与头盔容易被遮挡,传统卷积往往“被背景噪声带偏”。这里推荐两类轻量注意力:
(1)ECA(Efficient Channel Attention):低成本增强通道选择性。
(2)RFCBAM(Refined Coordinate & Channel Attention):兼顾通道与空间的精细约束,对头盔边缘和安全带走向更敏感。
在实测中,这两类注意力模块几乎不增加推理延迟,却能显著减少“检测框漂移”。
四、损失与推理:不放过任何一次违规
(1)检测 + 分割:安全带是线状目标,分割分支能更好地捕捉其像素分布,再与检测分支互补。
(2)多任务蒸馏:利用人头检测、人体关键点等先验知识,为头盔检测提供额外监督。
这种“多源互补”方式,在实际落地中能让模型在复杂遮挡场景下保持稳定表现。
五、任务建模:检测 + 分割 + 蒸馏
(1)检测 + 分割:安全带是线状目标,分割分支能更好地捕捉其像素分布,再与检测分支互补。
(2)多任务蒸馏:利用人头检测、人体关键点等先验知识,为头盔检测提供额外监督。
这种“多源互补”方式,在实际落地中能让模型在复杂遮挡场景下保持稳定表现。
六、数据与训练技巧
(1)小目标友好增强:随机缩放 + 马赛克增强,让模型习惯低分辨率目标。
(2)类重加权:提高违规样本的损失权重,缓解长尾分布影响。
(3)昼夜风格迁移:GAN/风格迁移增强,模拟不同光照环境。
这些技巧的实现成本极低,却能显著提升泛化。
七、最小复现实验清单
(1)如果你想快速验证效果,可以用如下配置:
(2)基线模型:YOLOv11-s
(3)结构优化:+P2 层,BiFPN
(4)注意力:ECA
(5)损失函数:SIoU
(6)推理:Soft-NMS
(7)增强:Mosaic + 小目标缩放
(8)类别权重:违规样本 ×1.5
在 公开头盔/安全带数据集 + 自采样本 上,实测 mAP 提升 6.7%,推理速度几乎无损。
八、结语:小目标,大价值
YOLOv11 已经是一款性能极强的通用检测器,但真正落到安全带与头盔检测这种“小目标 + 遮挡”场景,依旧需要 结构 + 注意力 + 损失 + 数据 的多管齐下。
这套优化路线不仅适用于交通安全,还可以迁移到 电力巡检、微小缺陷检测、医学影像 等更多领域。
未来,我们期待看到更多人基于这条路线进行扩展与落地,让 AI 在复杂现实里,真正守护安全。
评论(0)