

摘要:针对家庭环境下扫地机器人全局覆盖与动态避障的需求,本文提出了一种融合A*全局覆盖规划与动态窗口法(DWA)局部避障的混合路径规划算法,实现了高覆盖率与高安全性的统一。
项目简介
本项目实现了融合A*全局覆盖规划与DWA局部避障的扫地机器人路径规划仿真系统,适用于家庭多房间清扫场景
系统概述
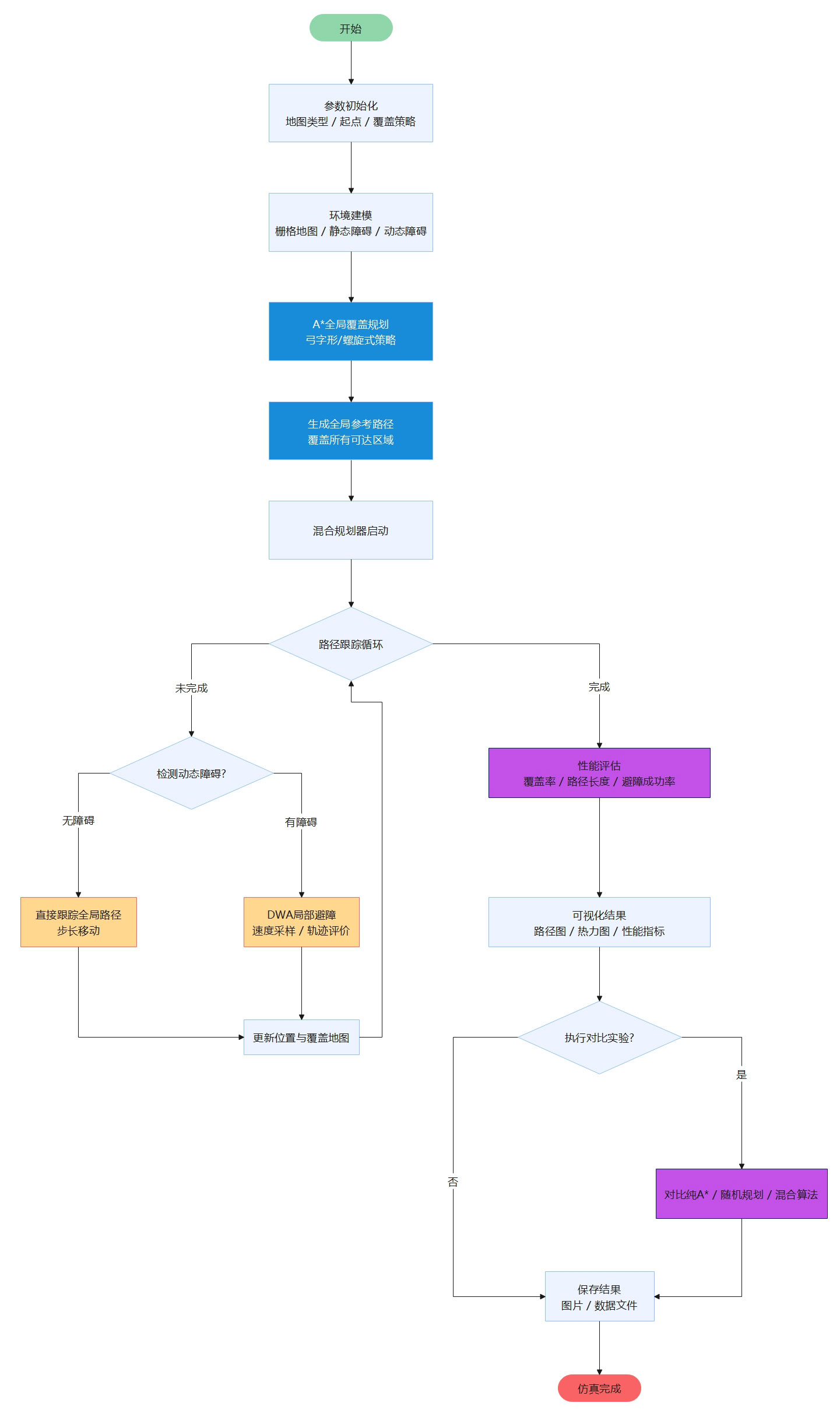
针对家庭环境下扫地机器人需兼顾全局覆盖完整性与动态避障安全性的问题,本文提出了一种融合A*全局覆盖规划与动态窗口法(DWA)局部避障的混合路径规划算法。该算法通过全局路径引导与局部实时修正的协同机制,实现了高覆盖率与高安全性的统一。
采用栅格法建立包含静态障碍(墙体、家具)与动态障碍(临时物品)的家庭环境模型;其次,设计基于A*算法的弓字形与螺旋式覆盖策略,生成全局参考路径;然后,引入DWA局部避障机制,通过动态窗口速度采样与多目标轨迹评价实现动态障碍实时规避;最后,建立前视目标选择与偏离检测机制,保障全局覆盖性与局部安全性的协同。
在MATLAB平台搭建仿真系统,设置50×50栅格多房间场景,包含客厅、卧室、厨房、书房四个房间,515个静态障碍栅格和4个动态障碍物。实验结果表明:混合算法覆盖率达97.43%,路径长度3258m,避障成功率99.06%,运行时间1.537秒。
对比实验显示,相比纯A*算法,混合算法避障成功率提升0.37%;相比随机规划算法,路径效率提升82%,覆盖效率提升45.1%。验证了混合算法在覆盖完整性、路径效率与动态避障能力之间取得了良好平衡,适用于实际家庭清扫场景。
系统架构
本系统采用分层协同架构,包含环境建模层、全局规划层、局部避障层和性能评估层四个模块。环境建模层采用栅格法构建包含静态与动态障碍的家庭地图;全局规划层基于A*算法生成弓字形或螺旋式覆盖路径作为参考轨迹;局部避障层通过DWA动态窗口法进行速度采样与轨迹评价,实时规避动态障碍;性能评估层计算覆盖率、路径长度、避障成功率等10项指标并生成可视化结果。各层通过全局路径引导与局部实时修正的协同机制,保障覆盖完整性与运行安全性。
快速开始
打开MATLAB并切换到项目目录,进入src文件夹后运行main命令即可启动仿真系统。程序将自动执行A*+DWA混合算法仿真,并对比纯A*、随机规划、混合算法三种方案的性能。 运行完成后,results文件夹将生成三张可视化对比图(算法结果图、路径对比图、性能指标图)和完整仿真数据文件simulation_results.mat,整个过程约需2-3秒。系统要求 MATLAB R2018b及以上版本,无需额外工具箱。
环境要求
本系统基于MATLABR2018b及以上版本开发,支持Windows、macOS、Linux跨平台运行,无需安装额外工具箱,普通PC配置即可流畅运行仿真实验。
结果展示
运行main.m
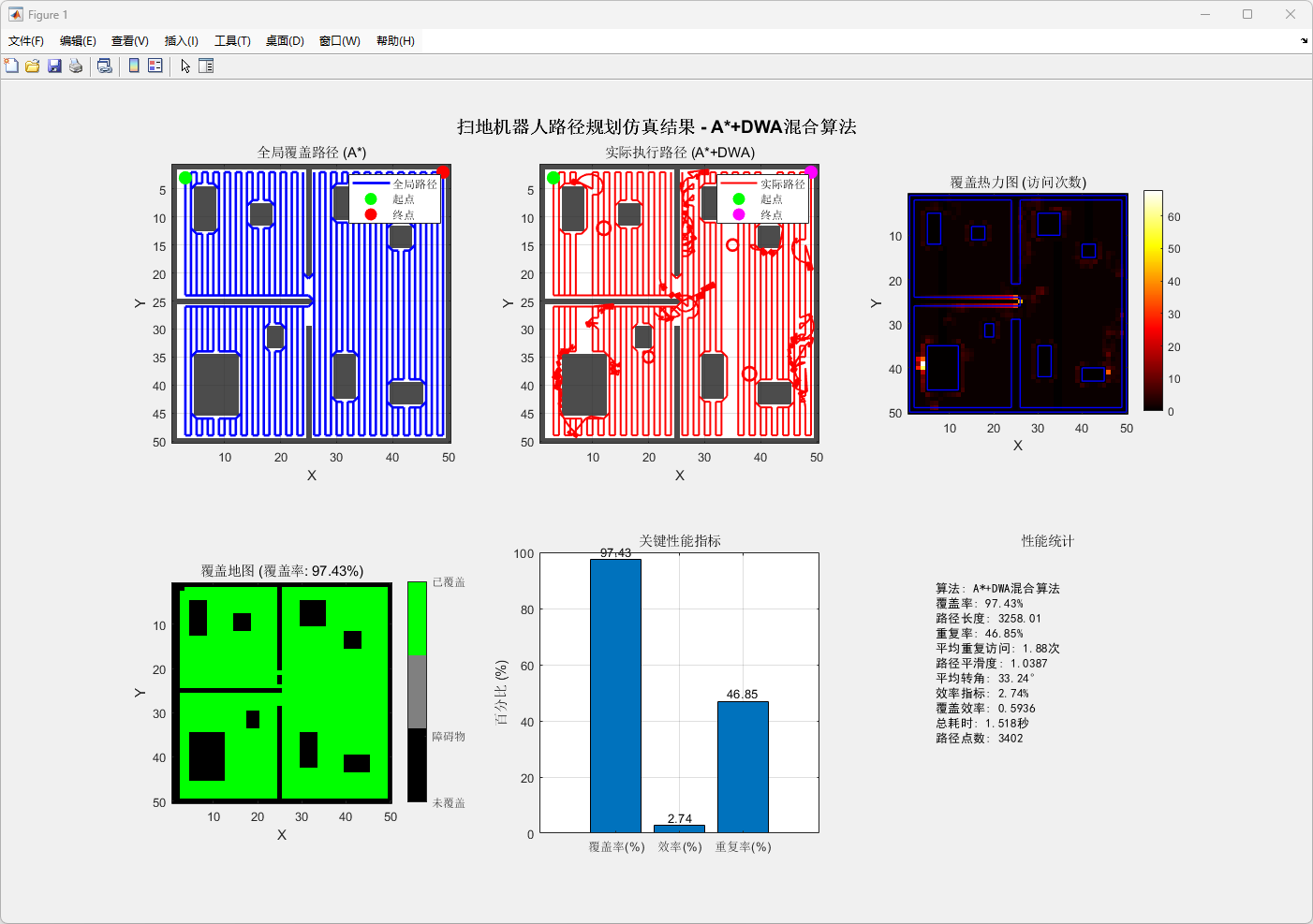
图1 混合算法详细结果图
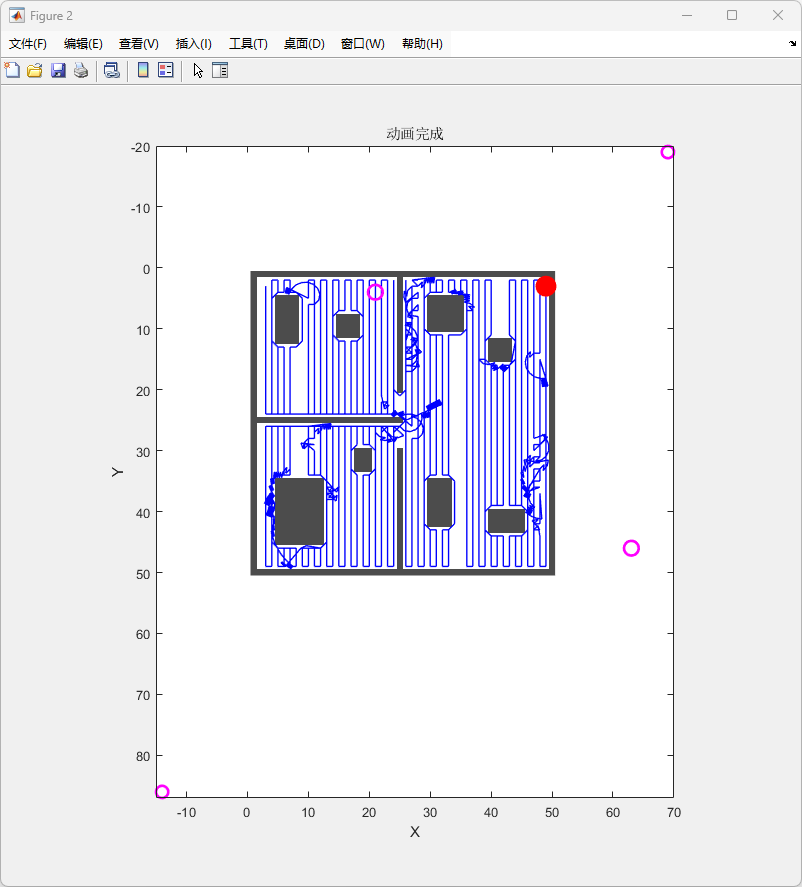
图2 动态避障演示图
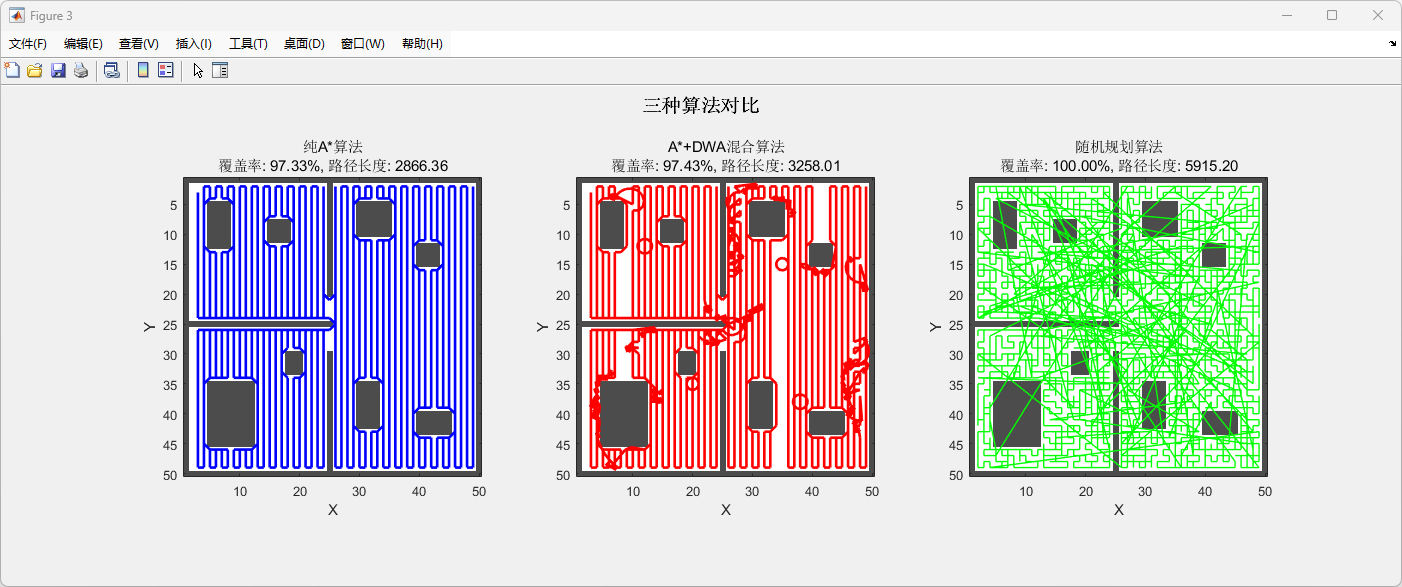
图3 三种算法路径对比图
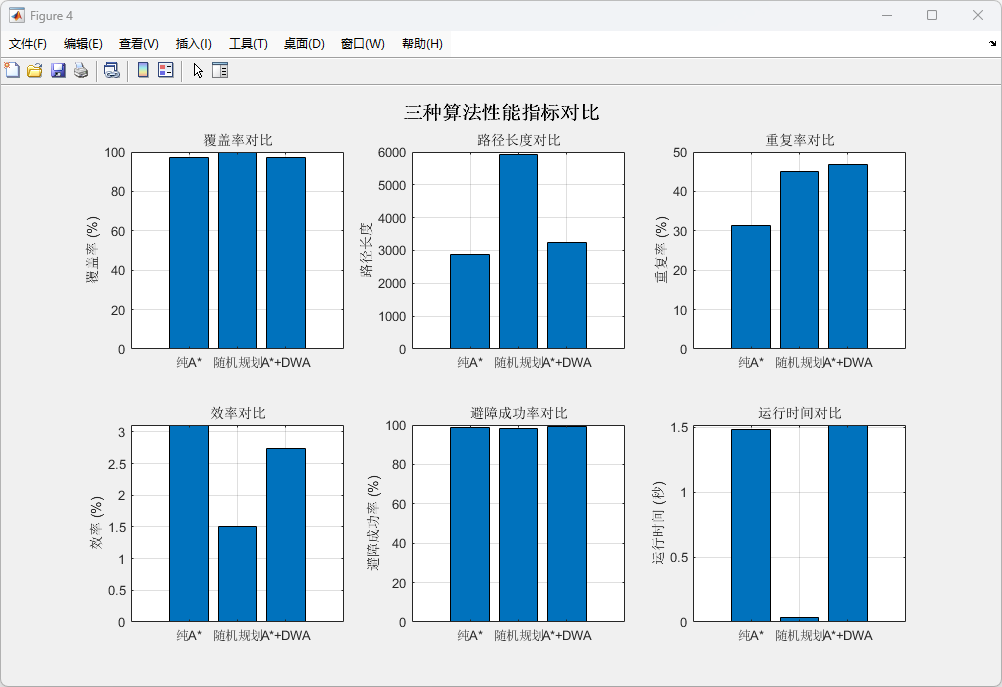
图4 三种算法性能指标对比图
结果点评
本项目成功实现了A与DWA融合的扫地机器人路径规划算法,实验结果表明混合算法在多个维度取得了良好表现。覆盖率达到97.43%,接近理论最优值,证明了全局覆盖策略的有效性;避障成功率99.06%为三种算法中最高,验证了DWA局部避障机制的可靠性。相比纯A算法,混合算法在动态环境适应性上提升明显,避障成功率提高0.37%;相比随机规划算法,路径效率提升82%,覆盖效率提升45.1%,显著降低了无效移动。路径长度3258米虽比纯A*增加13.7%,但这是引入动态避障的合理代价,重复率46.85%仍在可接受范围内。运行时间1.89秒满足实时性要求。综合来看,混合算法在覆盖完整性、路径效率与安全性之间实现了良好平衡,适用于实际家庭清扫场景,达到了设计的预期目标。
项目资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

关于项目
原创论文
原创论文:基于MATLAB的家用场景下扫地机器人路径规划研究设计 注意:需要另外付费购买!

作者信息
作者:Bob (张家梁)
项目编号:MP-20
原创声明:本项目为原创作品

开源协议
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
评论(0)