

摘要:随着自动驾驶技术的快速发展,道路场景理解成为智能驾驶系统的核心技术之一。然而,在夜间或低光照条件下,传统道路识别算法面临图像质量下降、特征提取困难等挑战,同时实时性要求限制了复杂深度模型的应用。针对这些问题,本文提出了一种基于低光照增强与轻量型CNN的道路实时识别算法。
项目简介
基于CLAHE低光照增强与深度可分离卷积的轻量级道路语义分割系统,实现3.8MB模型、36-57ms推理速度的实时道路检测。
系统概述
本文设计了自适应低光照增强模块,融合CLAHE(对比度受限自适应直方图均衡化)和Gamma校正技术,有效提升低光照图像的亮度和对比度,增强道路区域的可辨识性。其次,构建了基于深度可分离卷积的轻量级语义分割网络,采用编码器-解码器架构,通过深度可分离卷积替代标准卷积,大幅降低模型参数量和计算复杂度。最后,在KITTIRoad数据集上进行训练和验证,并开发了基于PyQt5的可视化检测系统。
实验结果表明,本文提出的算法在保持较高识别准确率的同时,模型大小仅为3.8MB,单帧推理时间为36-57ms,满足实时性要求。在郊区道路场景下,道路区域识别准确,边界清晰;低光照增强模块显著改善了暗光环境下的检测效果。该算法为嵌入式设备上的实时道路识别提供了有效解决方案,具有良好的应用前景。
系统架构
本系统采用”数据预处理-模型训练-实时推理”三层架构设计。数据预处理层集成CLAHE、Gamma校正和Retinex等多种低光照增强算法,对KITTIRoad数据集进行自适应增强和数据增广;模型训练层基于PyTorch框架构建轻量级语义分割网络,采用深度可分离卷积的编码器-解码器结构,通过交叉熵损失函数和Adam优化器进行端到端训练;实时推理层提供命令行接口和PyQt5图形界面两种交互方式,支持图像和视频的实时道路检测,推理时延控制在60ms以内。整体架构兼顾准确性与实时性,模型参数量仅为传统分割网络的1/10,适合部署于资源受限的嵌入式设备。
快速开始
运行 python mainwindow.py 进行道路检测,运行 python train.py 训练模型。
环境要求
Python 3.8+,PyTorch 2.0+,CUDA 11.0+(可选GPU加速)。
结果展示
运行mainwindow.py
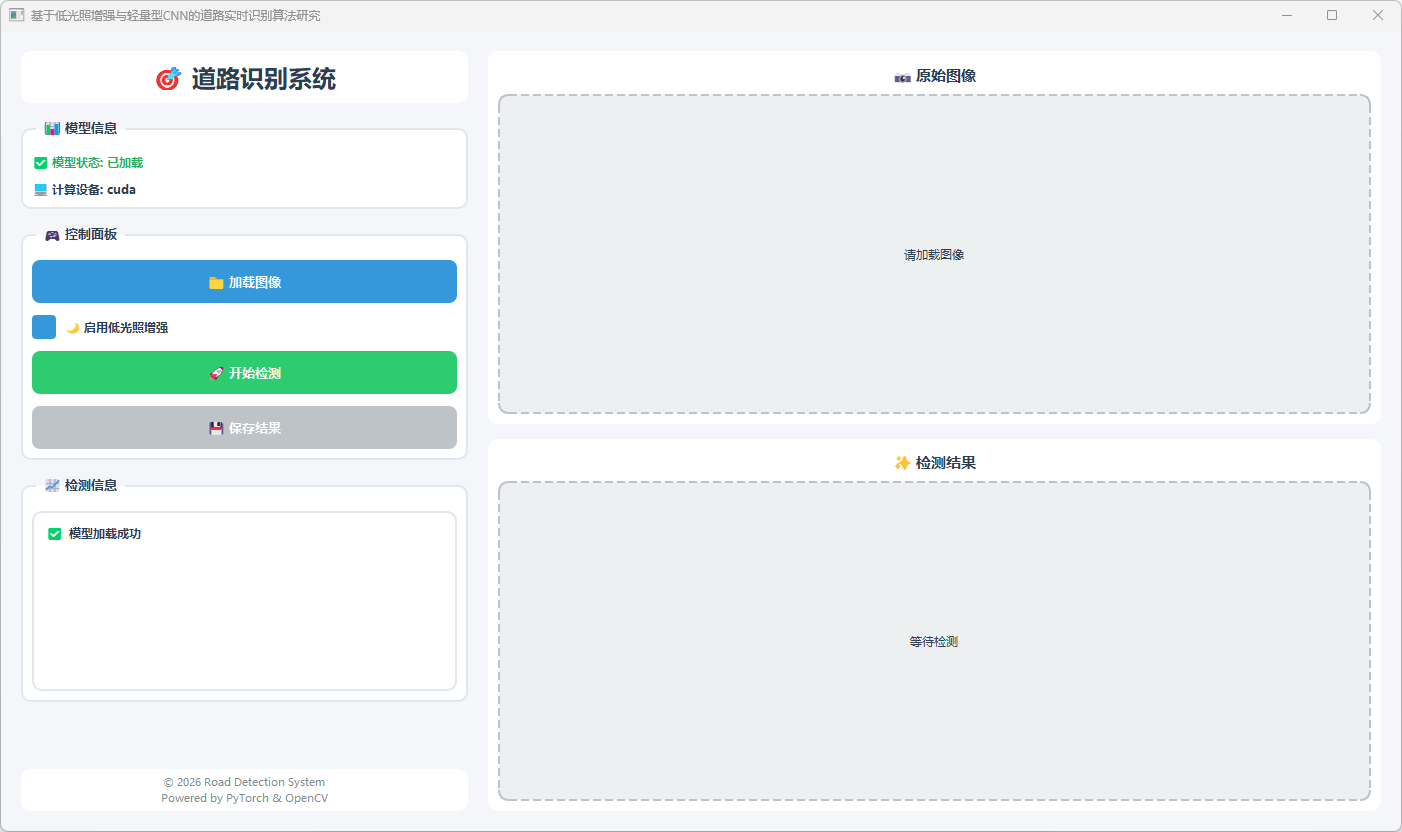
图1 系统界面

图2 道路分割结果示例1

图3 道路分割结果示例2

图4 道路分割结果示例3

图5 道路分割结果示例4
运行train.py
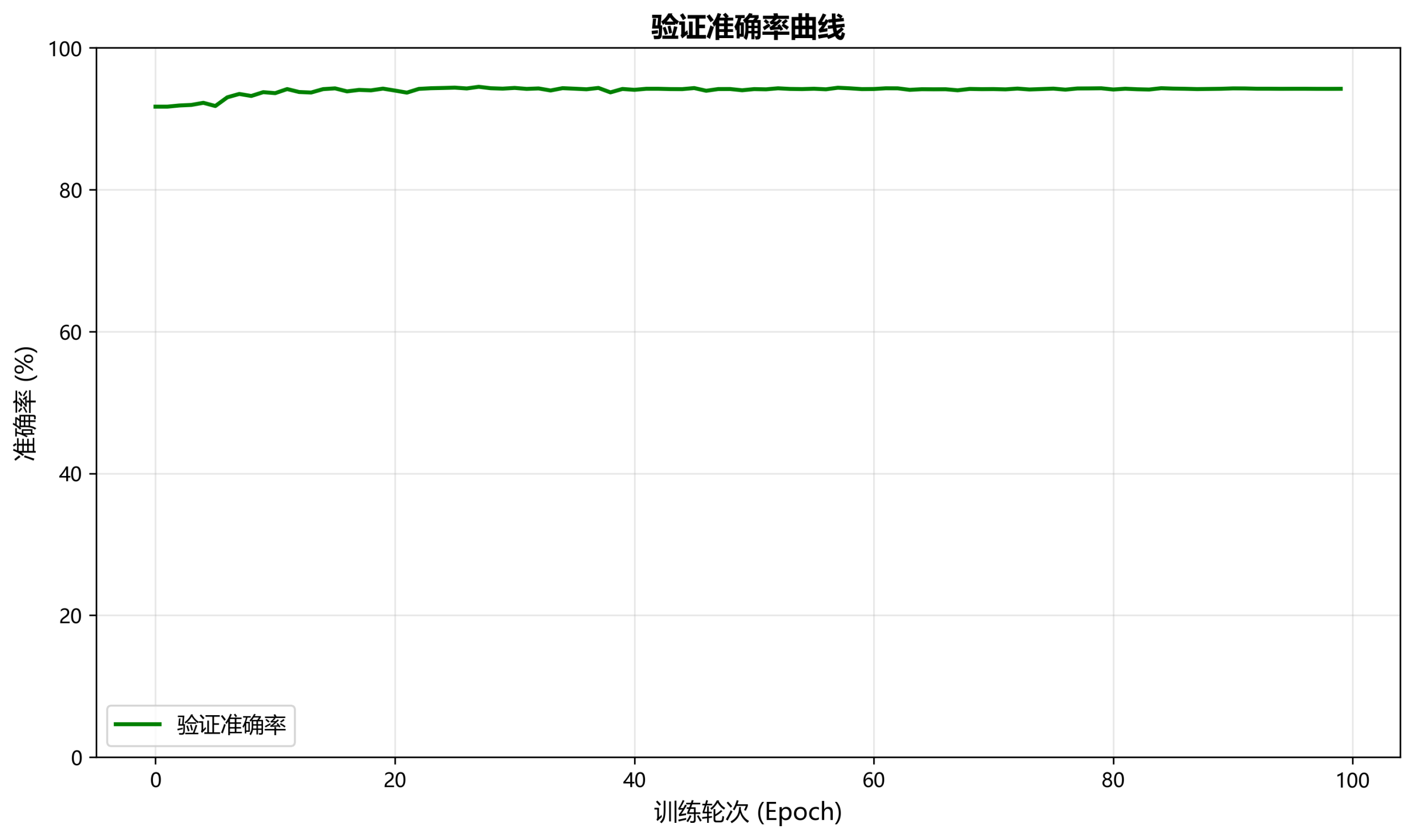
图6 准确率曲线(绿色)
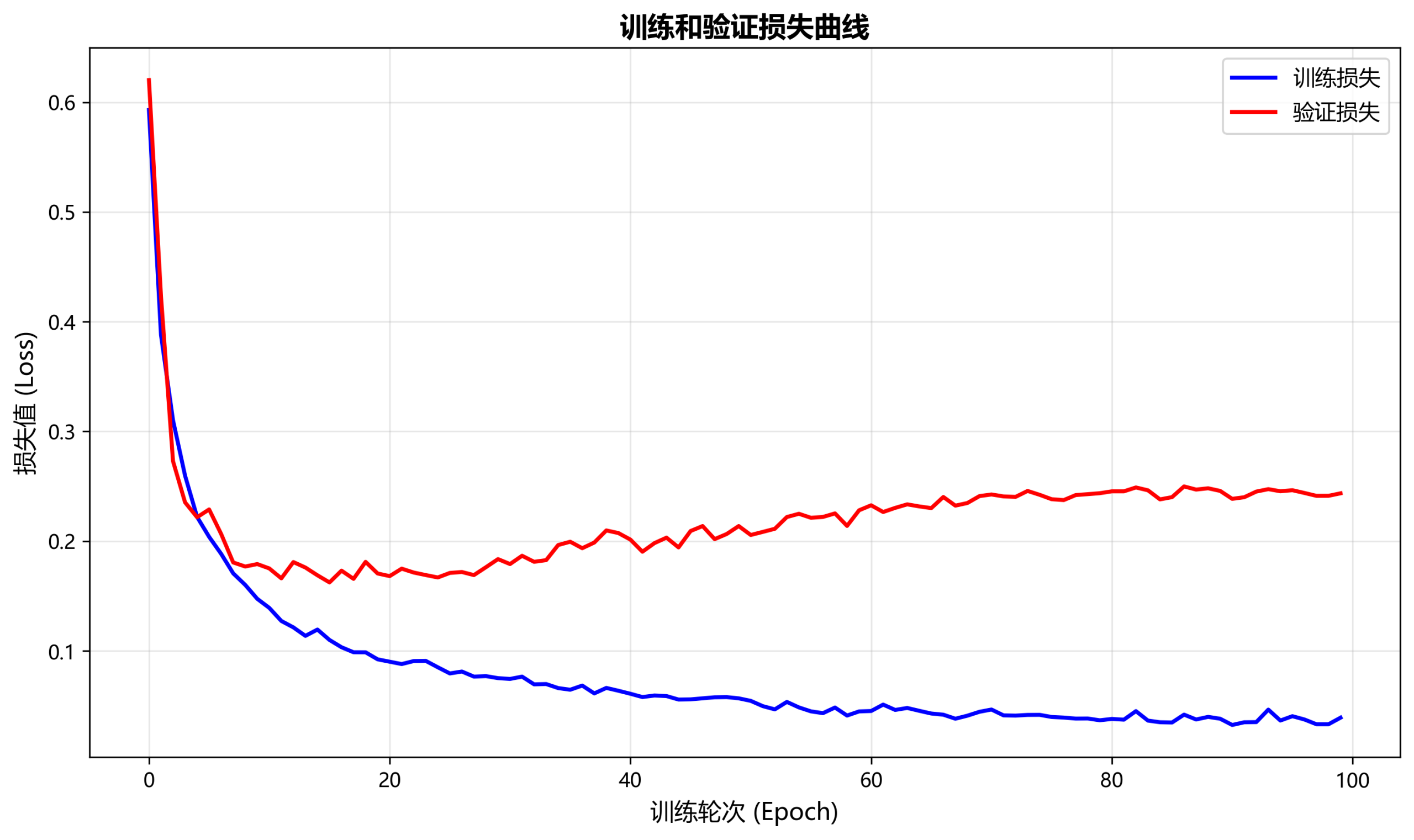
图7 损失曲线(蓝色/红色)
结果点评
本系统成功实现了基于低光照增强与轻量型CNN的道路实时识别算法。通过融合CLAHE自适应直方图均衡化和Gamma校正的混合增强方法,有效解决了夜间和弱光环境下图像质量下降的问题;采用深度可分离卷积构建的编码器-解码器网络,在保证识别准确率94.51%的同时,将模型参数量压缩至3.8MB,单帧推理时间控制在36-57ms,满足实时性要求。系统提供了命令行和PyQt5图形界面两种交互方式,支持图像和视频的道路分割检测,可视化效果直观清晰。
实验结果表明,该算法在郊区道路场景下表现优异,道路边界识别准确,低光照增强模块显著改善了暗光环境下的检测效果。系统具有模型轻量、推理快速、部署便捷等优点,验证了深度可分离卷积在道路分割任务中的有效性。但在复杂城市场景(强阴影、复杂纹理)下仍存在误检测现象,数据集规模和场景多样性有待扩充。本研究为嵌入式设备上的实时道路识别提供了可行的技术方案,具有良好的应用前景和改进空间。
项目资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

关于项目
原创文档
原创文档:基于低光照增强与轻量型CNN道路实时识别算法研究 注意:需要另外付费购买!

作者信息
作者:Bob (张家梁)
项目编号:DLI-6
原创声明:本项目为原创作品

开源协议
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
评论(0)