编号:D257
大小:11M
环境:Matlab2020b
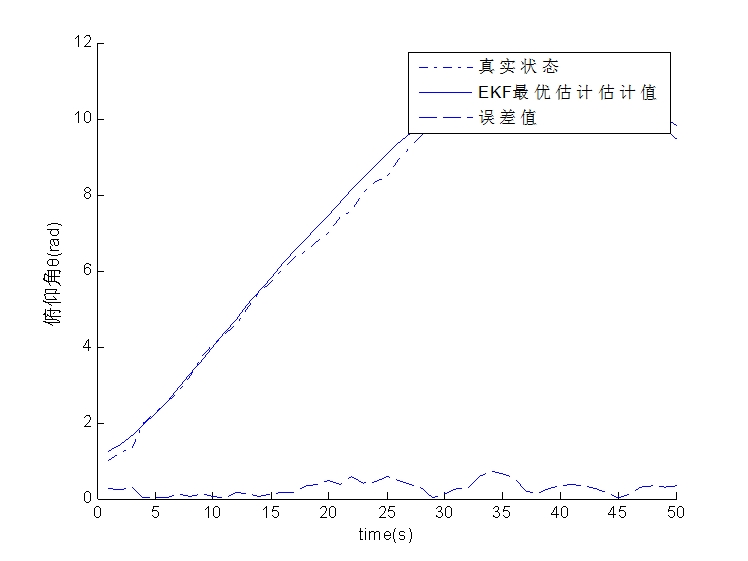
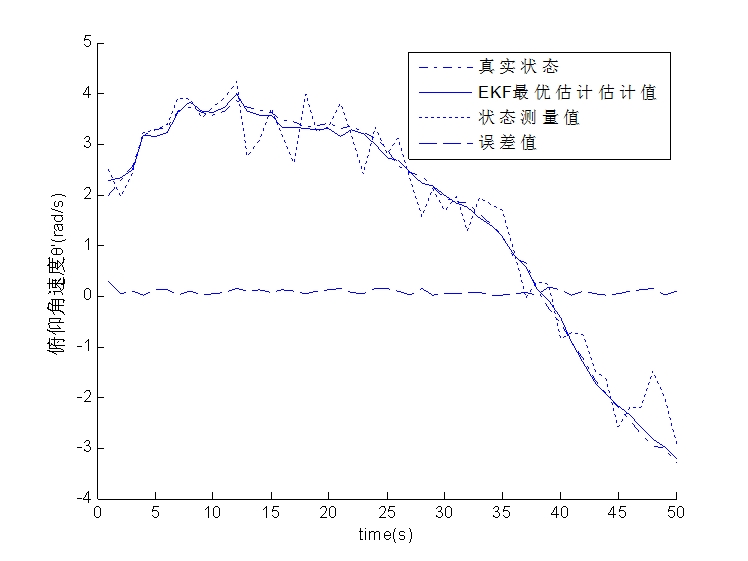
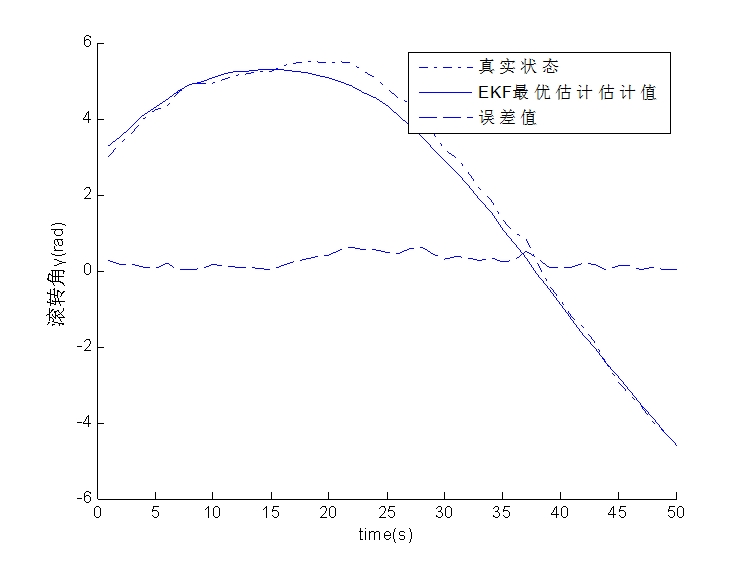
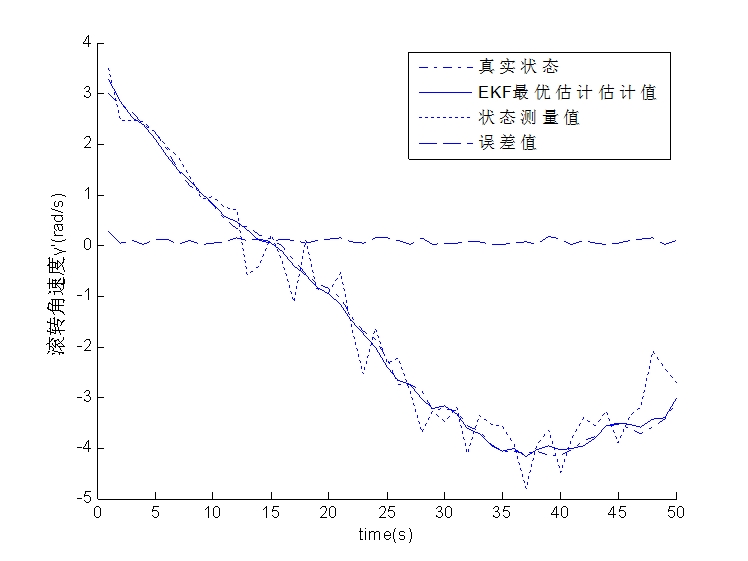
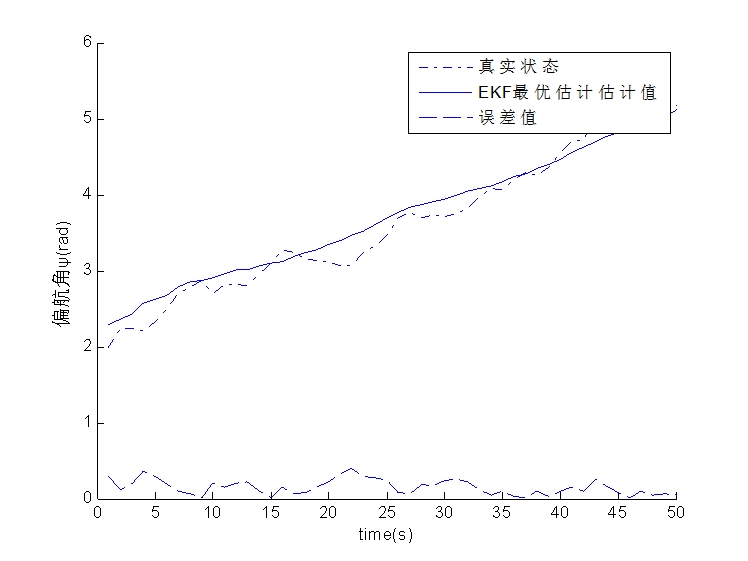
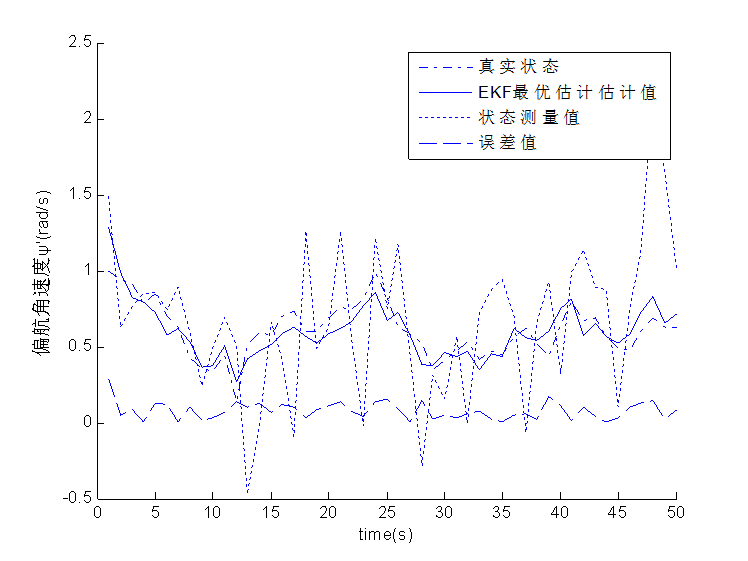
简介:用EKF(Extended Kalman Filter, 扩展卡尔曼滤波)算法来对四旋翼无人机的姿态进行滤波和估计,姿态包括:俯仰角、滚转角、偏航角的角度值和角速度值。前提:角度值无法直接通过传感器直接测得,角速度值可以测得。
代码说明
test1.m:一维线性卡尔曼滤波的例子
jaccsd.m:用于求解EKF算法中的雅克比矩阵
EKF.m:EKF算法仿真程序
仿真结果
说明:
1.仿真软件采用MATLAB2010b
2.控制量和姿态角速度值采用随机生成的数据(使用实际数据更好)
3.仿真过程偶尔会出现错误结果,原因是EKF计算过程中有几率出现奇异矩阵,导致算法无法进行下去
运行展示
俯仰角
俯仰角速度
滚转角
滚转角速度
偏航角
偏航角速度
配套文件
我们提供完整项目文件清单如下:
文件目录
├ 1.项目源码
├ 2.运行截图
└ 3.演示视频
1. 本站所有资源来源于原创和复现,如有侵权请邮件联系站长!
2. 分享目的仅供大家学习和交流,请不要用于商业用途!
3. 如果你也有好源码或者文档,可以与我们交换,分享有积分奖励和额外收入!
4. 本站提供的源码、文档等等其他资源,都不包含技术服务请大家谅解!
5. 如有链接无法下载、失效或广告,请联系管理员处理!
6. 本站资源售价只是赞助,收取费用仅维持本站的日常运营所需!
7. 如遇到加密压缩包,默认解压密码为"www.2zcode.com",如遇到无法解压的请联系管理员!
8. 因为资源和程序源码均为可复制品,所以不支持任何理由的退款兑现,请斟酌后支付下载
声明:网站内的所有源码都经过我们亲自测试,均可以正常使用.
索炜达.猿创 » 基于Matlab用EKF算法来对四旋翼无人机的姿态进行滤波和估计
2. 分享目的仅供大家学习和交流,请不要用于商业用途!
3. 如果你也有好源码或者文档,可以与我们交换,分享有积分奖励和额外收入!
4. 本站提供的源码、文档等等其他资源,都不包含技术服务请大家谅解!
5. 如有链接无法下载、失效或广告,请联系管理员处理!
6. 本站资源售价只是赞助,收取费用仅维持本站的日常运营所需!
7. 如遇到加密压缩包,默认解压密码为"www.2zcode.com",如遇到无法解压的请联系管理员!
8. 因为资源和程序源码均为可复制品,所以不支持任何理由的退款兑现,请斟酌后支付下载
声明:网站内的所有源码都经过我们亲自测试,均可以正常使用.
索炜达.猿创 » 基于Matlab用EKF算法来对四旋翼无人机的姿态进行滤波和估计
常见问题FAQ
- 免费下载或者VIP会员专享资源能否直接商用?
- 本站所有资源版权均属于原作者所有,这里所提供资源均只能用于参考学习用,请勿直接商用。若由于商用引起版权纠纷,一切责任均由使用者承担。更多说明请参考 VIP介绍。
- 提示下载完但解压或打开不了?
- 你们有qq群吗怎么加入?




