

摘要:随着工业生产和科学研究对颗粒材料特性分析需求的不断增加,传统的人工测量方法已难以满足高效率、高精度的要求。本文设计并实现了一种基于MATLAB的不规则颗粒图像析系统,可自动完成颗粒的识别、分割、计数及多参数测量。
项目简介
本项目基于 MATLAB 图像处理技术,实现对不规则颗粒的自动识别、分割、计数及多参数测量,并支持结果可视化与 Excel 导出。
系统概述
随着工业生产和科学研究对颗粒材料特性分析需求的不断提高,传统人工测量方法在效率和精度方面已难以满足实际应用要求。为此,本文设计并实现了一种基于 MATLAB 的不规则颗粒图像分析系统,可自动完成颗粒的识别、分割、计数及多参数测量。
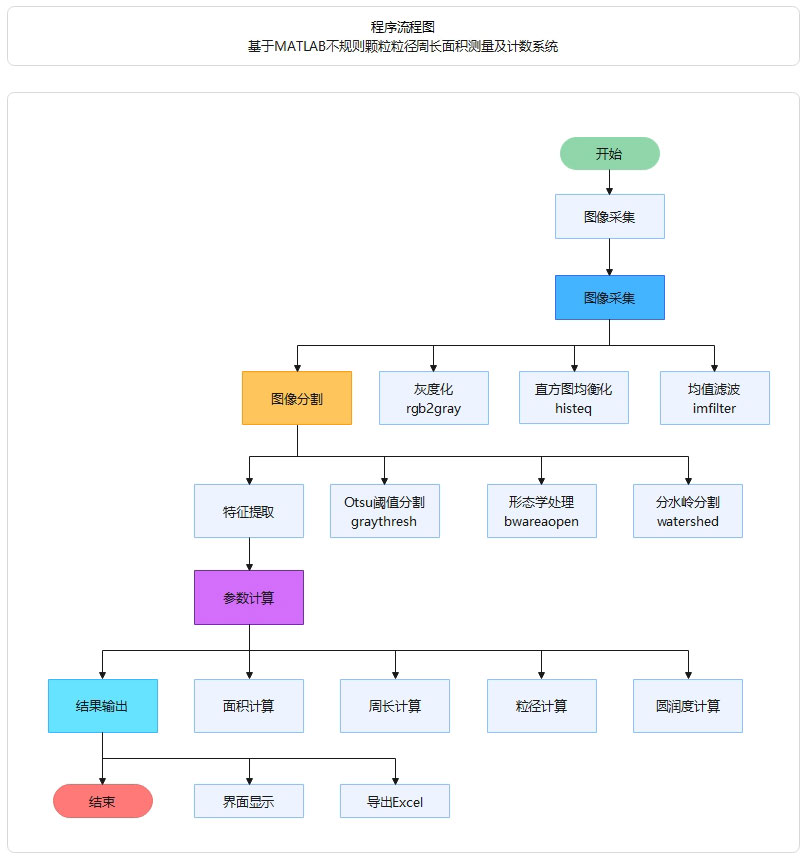
该系统采用数字图像处理技术对颗粒图像进行分析,整体处理流程如下:首先对采集的颗粒图像进行灰度化处理,并通过直方图均衡化增强图像对比度;随后采用均值滤波方法抑制噪声干扰;在此基础上,利用 Otsu 阈值分割算法实现图像的二值化与边缘提取。针对颗粒粘连问题,系统引入距离变换与分水岭分割算法相结合的方法,实现对粘连颗粒的有效分离;最后通过边界追踪算法提取各颗粒轮廓,计算颗粒的等效粒径、周长、面积及圆润度等形态学参数。
传统人工测量颗粒粒径存在效率低、误差大的问题。针对这一不足,本文基于 MATLAB App Designer 平台开发了一套图形用户界面(GUI)系统。该系统界面操作简便、直观,支持 JPG、PNG、BMP、TIF 等多种格式图像的导入,并可将测量结果一键导出为 Excel 文件(包含“颗粒数据”和“统计信息”两个工作表),便于后续的数据分析与处理。实验结果表明,系统能够准确识别并分割不规则形状颗粒,利用分水岭算法有效解决颗粒粘连问题,可广泛应用于农业种子检测、矿物颗粒分析以及制药工业等领域的颗粒特性研究。
系统架构
系统基于 MATLAB 面向对象编程思想开发,继承 matlab.apps.AppBase 类,并通过代码方式构建 GUI 界面。系统采用串行的图像处理流水线架构,整体流程为:图像采集 → 灰度化 → 图像增强 → 滤波处理 → Otsu 阈值分割 → 形态学处理 → 分水岭分割 → 边界提取 → 参数计算 → 结果输出。
项目结构
项目采用单目录结构,主程序 Seed_Recognition.m 包含GUI界面和所有图像处理逻辑,myArea.m 和 MyPerimeter.m 为独立的参数计算函数,测量结果导出至 pellet_data.xlsx。。
目录结构

核心模块
系统采用模块化设计,由图像预处理、图像分割、参数计算和结果输出四大核心模块组成。图像预处理模块通过灰度化、直方图均衡化和均值滤波消除噪声并增强对比度;图分割模块采用 Otsu 自适应阈值结合分水岭算法,有效分离粘连颗粒;参数计算模块基于边界追踪提取轮廓,利用鞋带公式计算面积、累加边界点距离计算周长,并通过等效半径与最大距离比值评估圆润度;结果输出模块支持 GUI 实时显示与 Excel 批量导出,实现从图像采集到数据分析的完整闭环。
快速开始
在 MATLAB 命令窗口输入 Seed_Recognition 即可启动系统,按照界面按钮顺序(1-10)依次操作完成颗粒测量分析。
环境要求
本系统需要 MATLAB R2024b 或更高版本,依赖 Image Processing Toolbox 图像处理工具箱(用于 imbinarize、bwdist、watershed 等函数)。程序基于 App Designer 框架开发,GUI 窗口尺寸为1200×750 像素,建议屏幕分辨率不低于 1280×800。
运行实验
启动系统后,首先在”参数设置”面板输入背景纸的实际尺寸(默认长 19.2cm、宽 16.5cm)和小尺寸过滤阈值(默认 300 像素)。点击”1. 导入图片”加载待测图像(支持 JPG/PNG/BMP/TIF 格式),依次执行”2. 灰度处理”→”3. 图像增强”→”4. 图像滤波”完成预处理。随后点击”5. 边缘检测”进行二值化分割,”6. 去除小对象”过滤噪点,”7. 检测联结”识别粘连区域,”8.联结分割”通过分水岭算法分离粘连颗粒。最后点击”9. 参数分析”计算各颗粒的半径、周长、面积和圆润度,结果显示在界面表格中,可通过”10. 导出Excel”保存至 pellet_data.xlsx 文件。
查看结果
参数分析完成后,界面顶部”测量结果”面板会显示检测到的颗粒总数,下方表格列出每颗颗粒的编号、半径(cm)、圆润度、周长(cm)和面积(cm²)五项指标。圆润度取值范围 0~1,越接近 1 表示颗粒越接近圆形。导出的 Excel文件包含两个工作表:”颗粒数据”记录所有颗粒的详细参数(含直径),”统计信息”汇总颗粒总数、平均直径、直径标准差、最小/最大直径、平均面积和平均周长等统计量
实验结果
经测试,系统能够准确识别并分割图像中的不规则颗粒,自动计算各颗粒的粒径、周长、面积及圆润度参数,测量结果可导出至 Excel 供后续分析使用。
识别效果
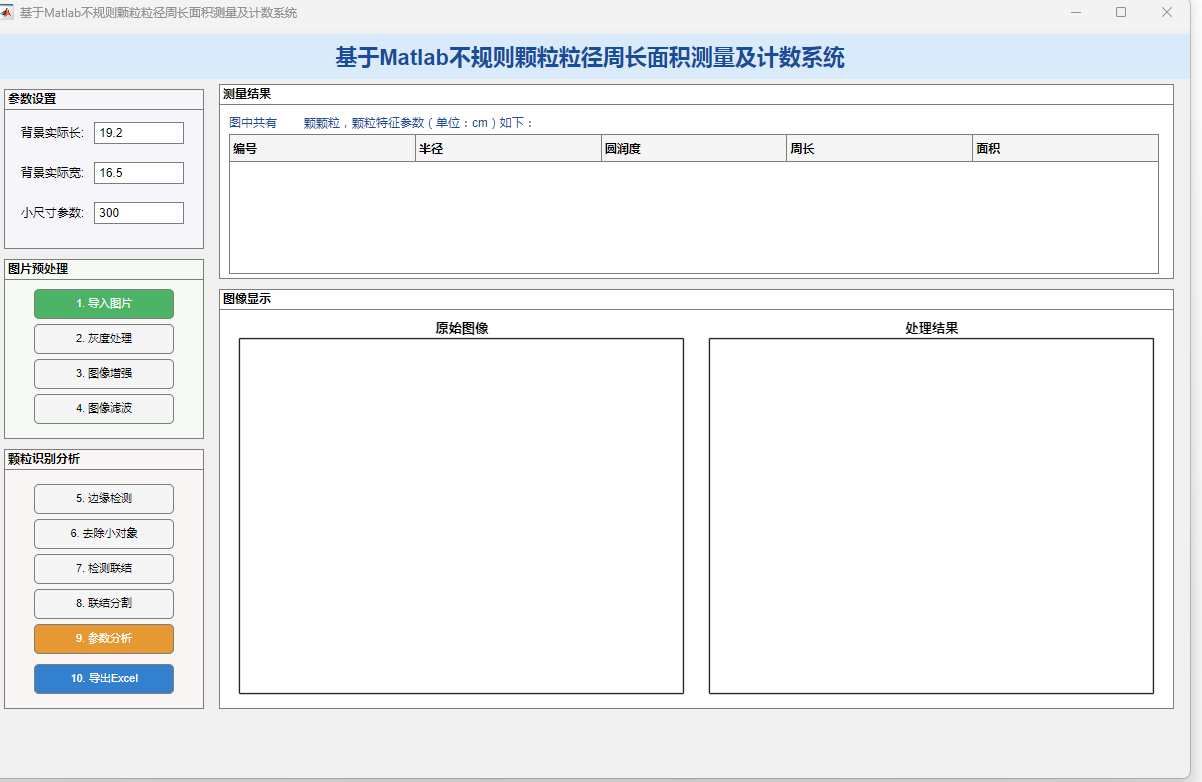
图1 主界面
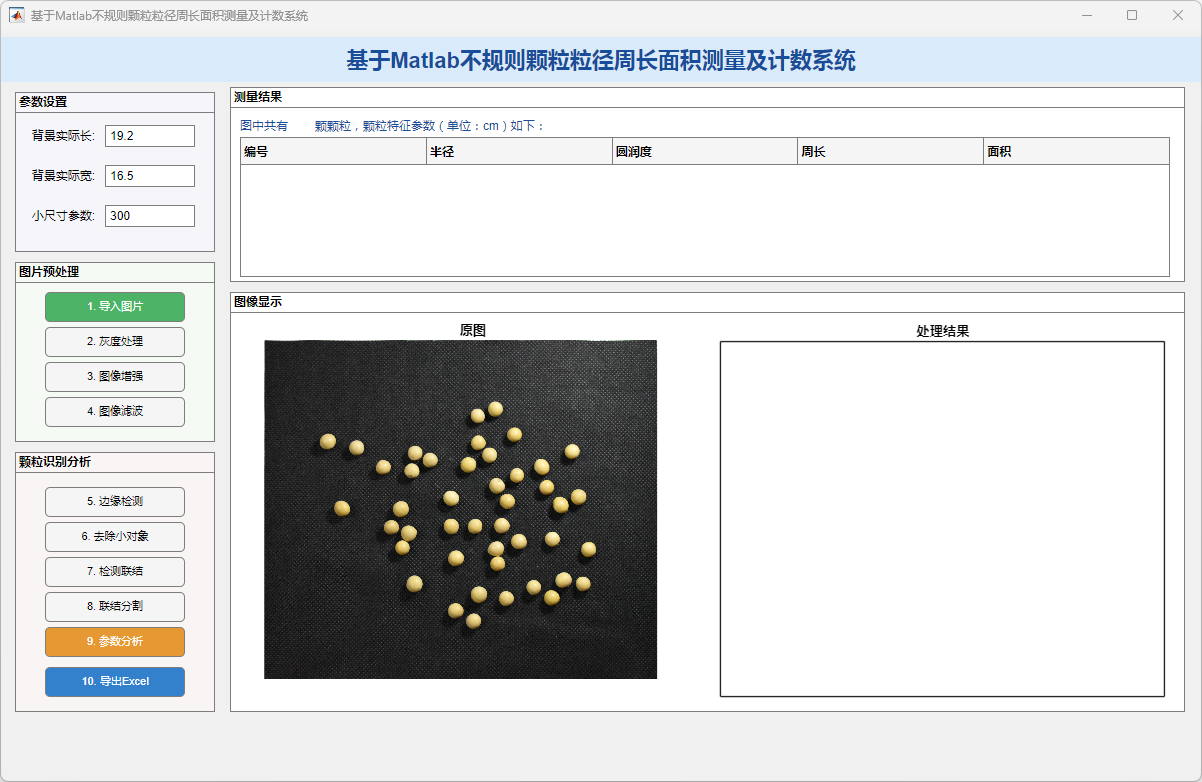
图2 导入图片
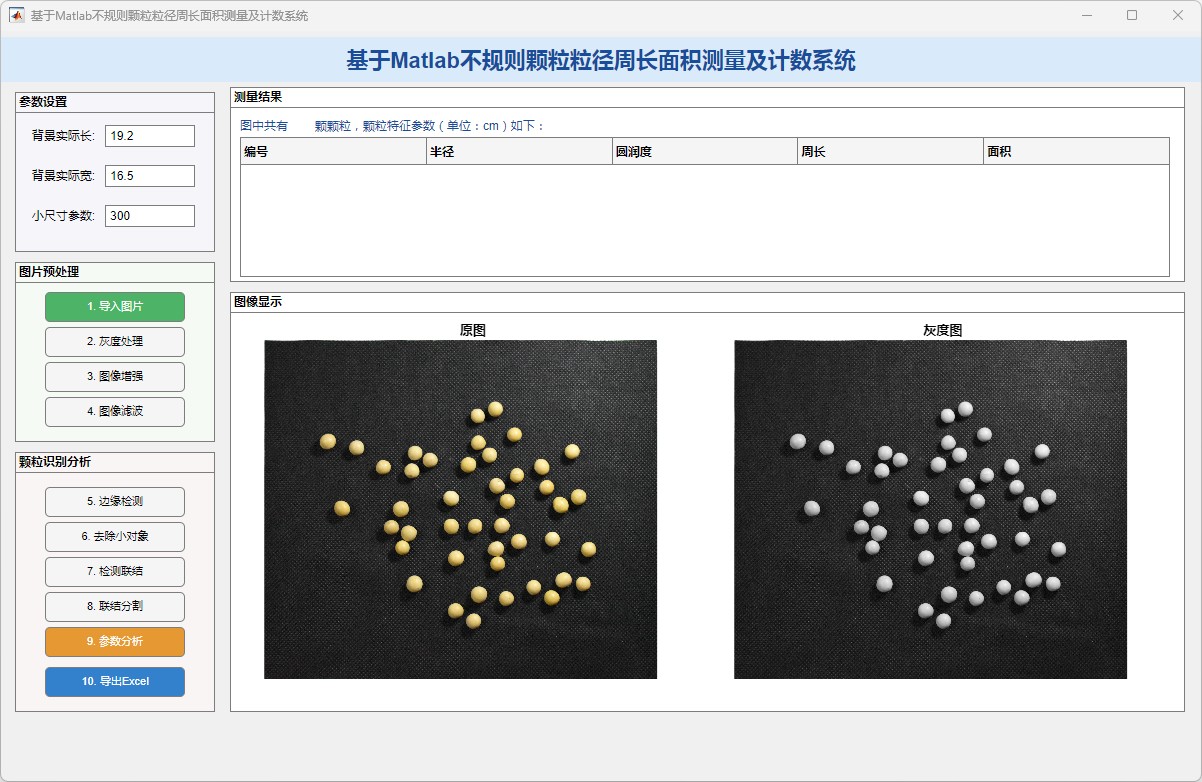
图3 灰度处理
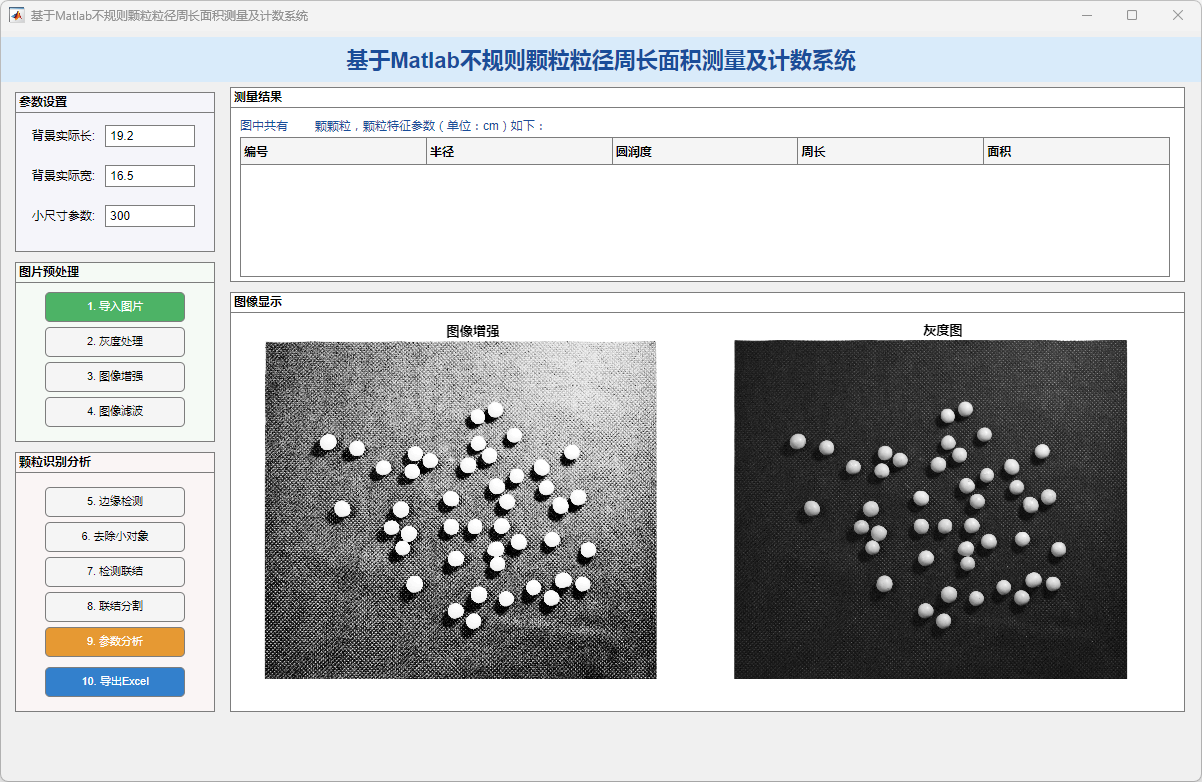
图4 图像增强
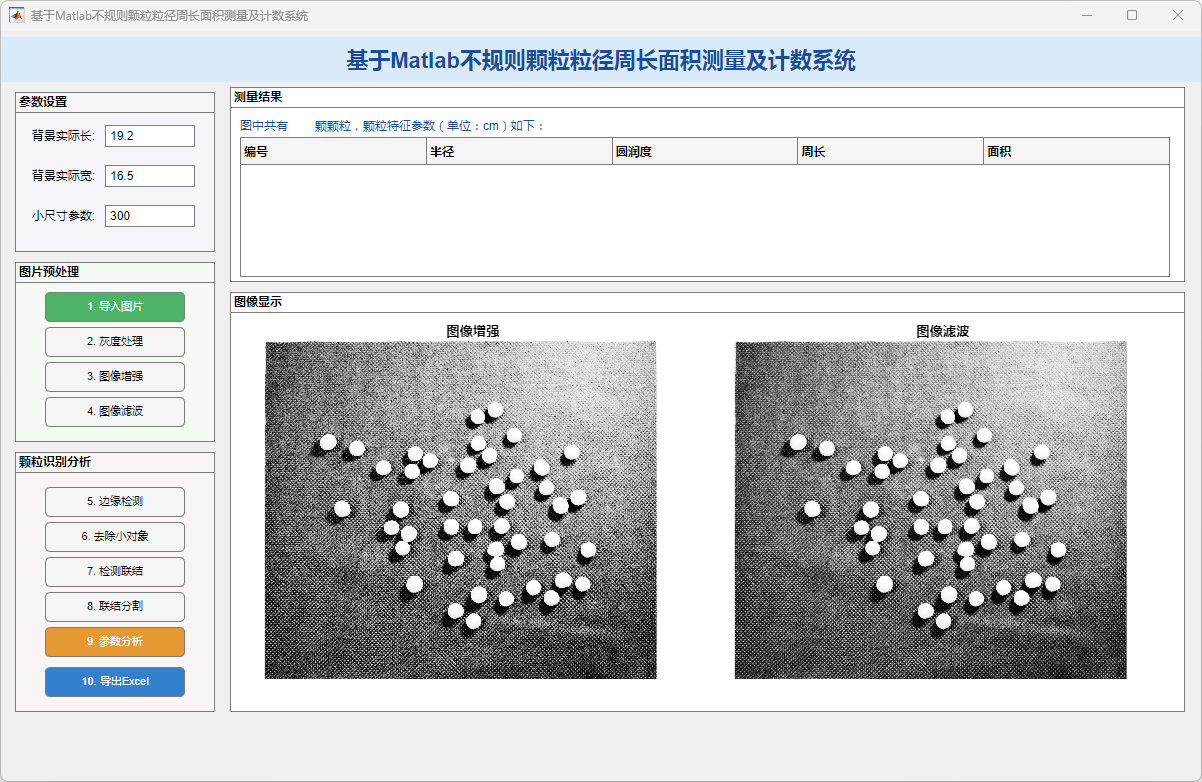
图5 图像滤波
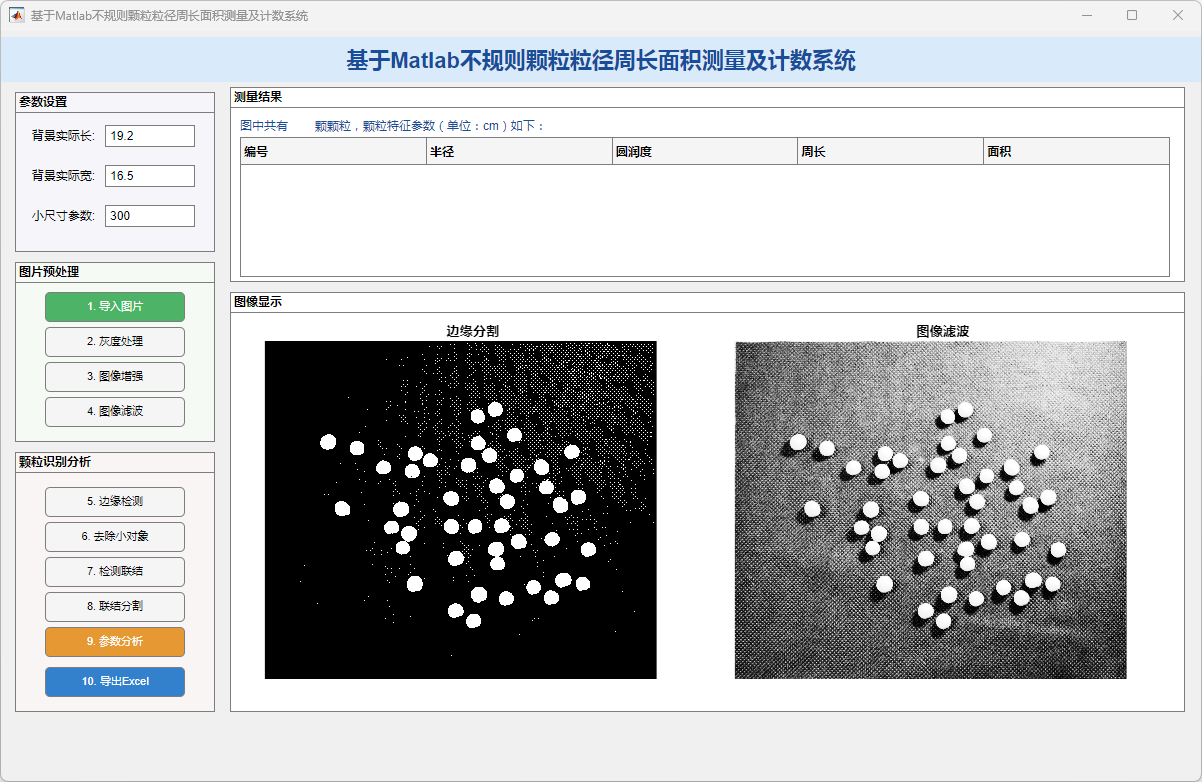
图6 边缘检测
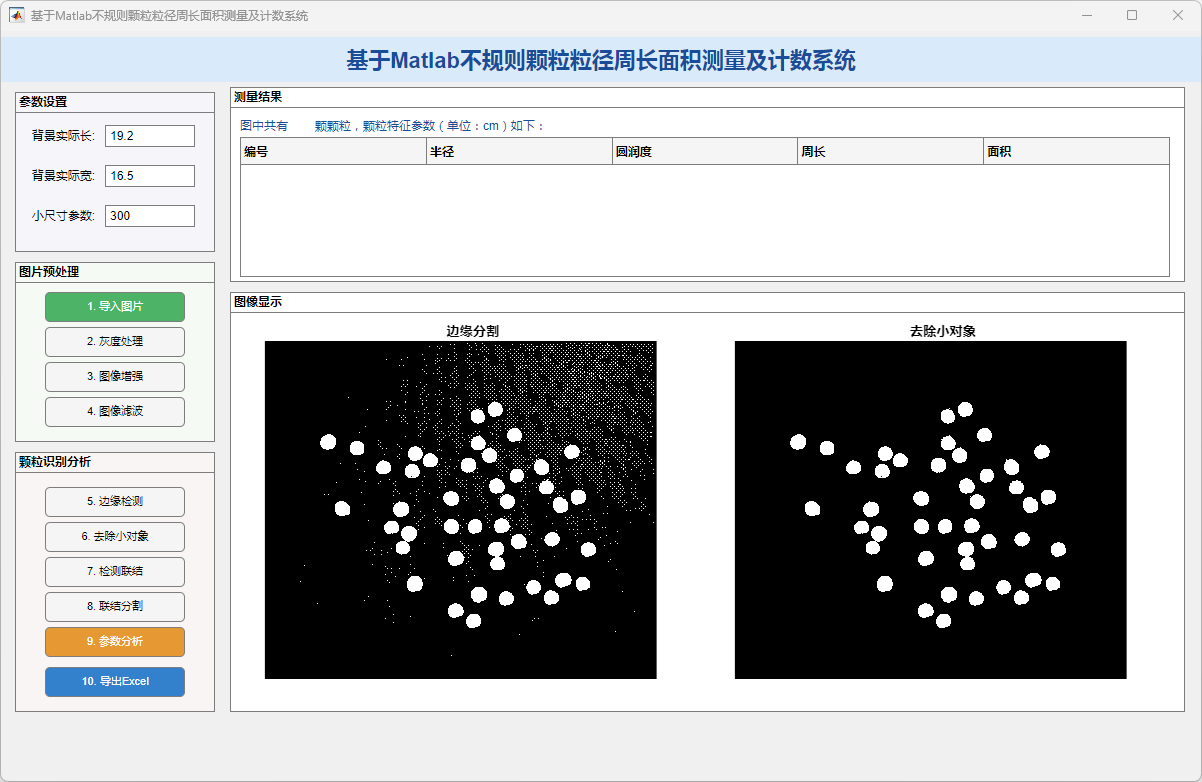
图7 去除小对象
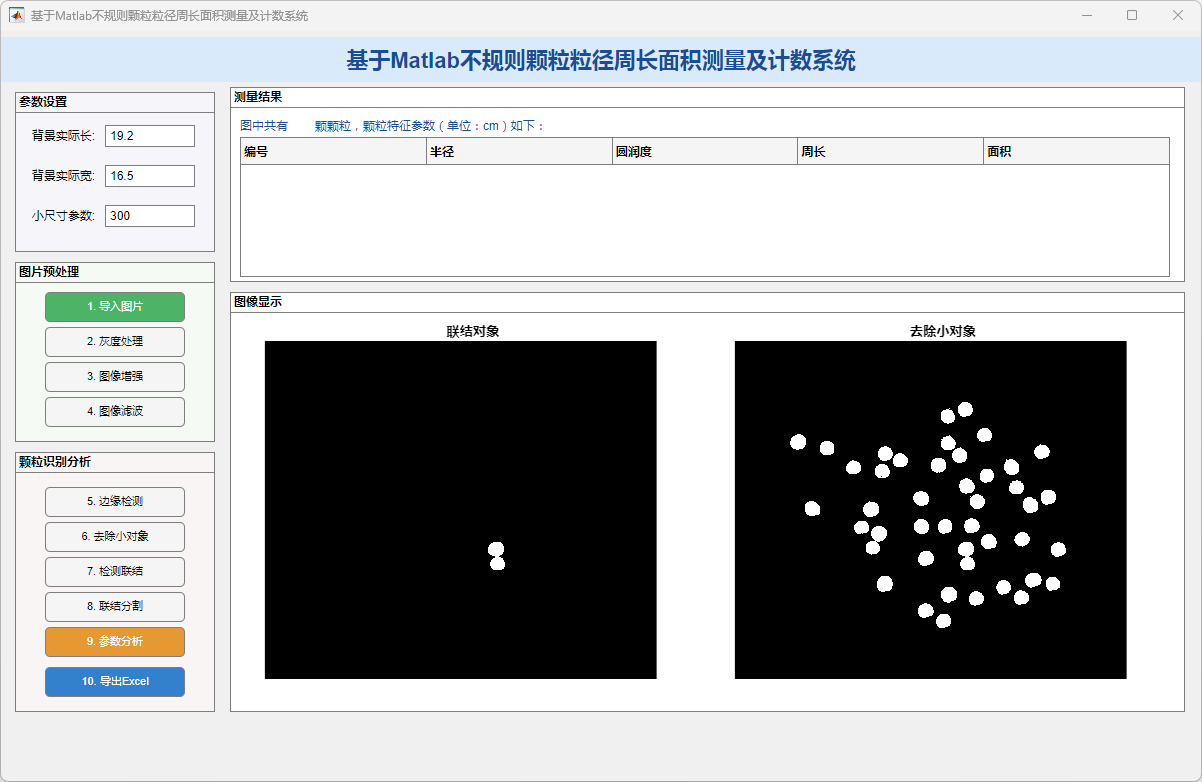
图8 检测联结
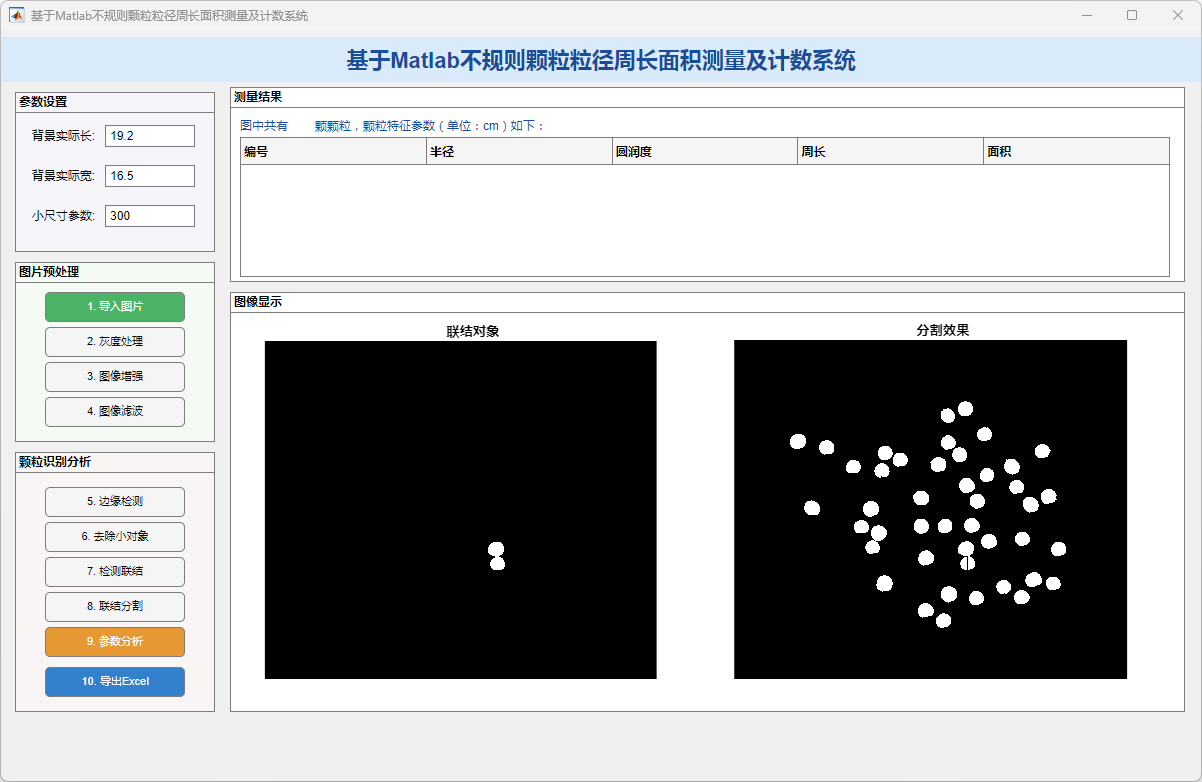
图9 联结分割
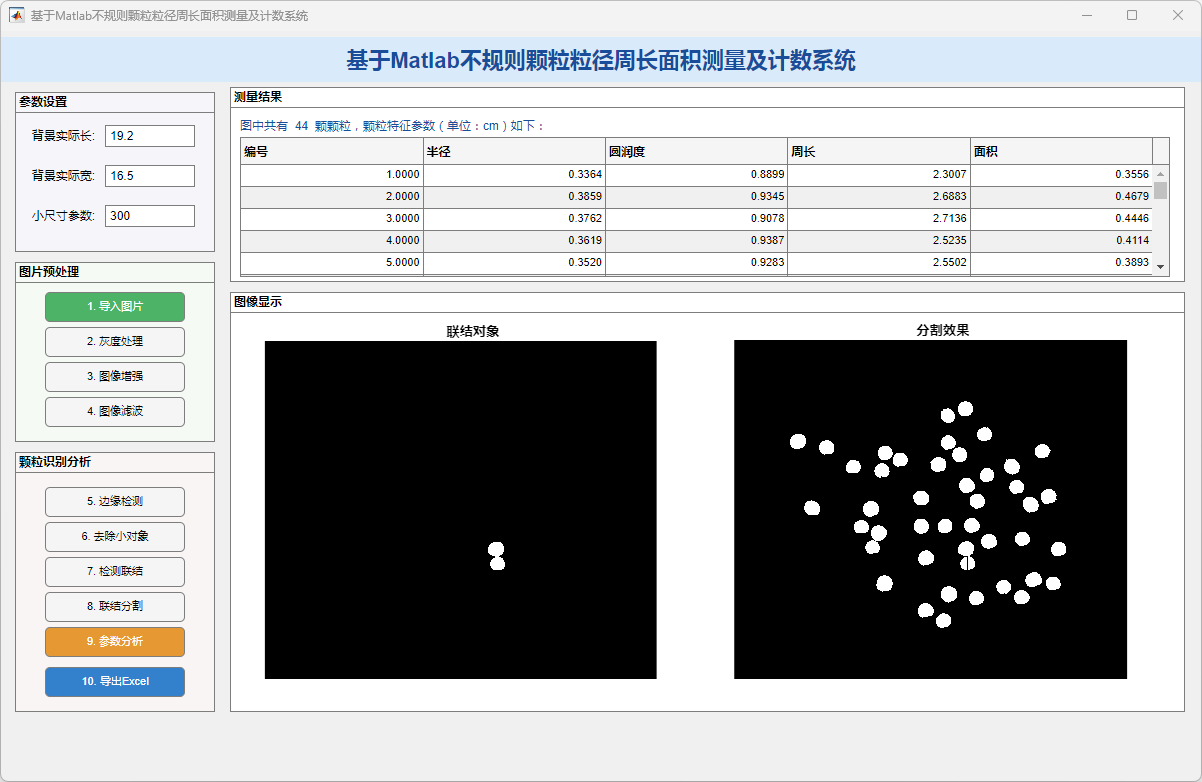
图10 参数分析
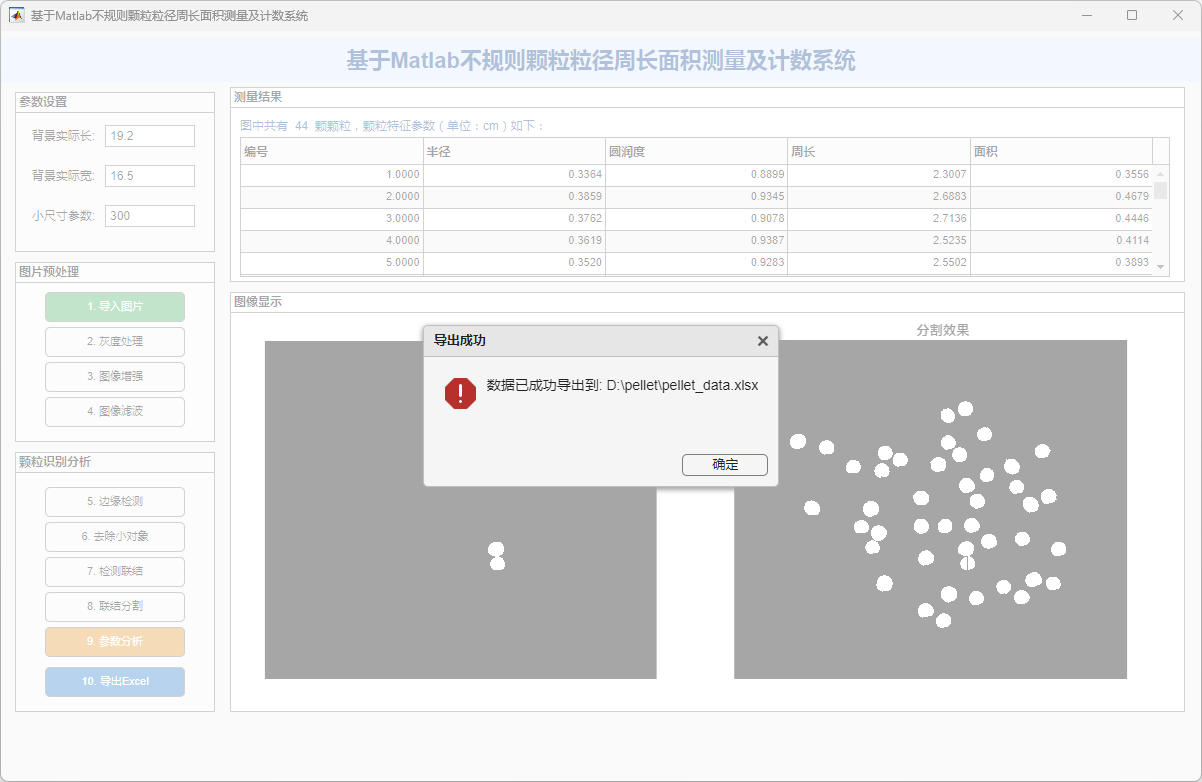
图11 导出Excel.png
结果点评
系统整体运行稳定,分水岭分割对粘连颗粒处理效果良好,参数计算结果准确可靠,满足不规则颗粒粒径测量与计数的实际需求。
项目资源
项目包含 3 个 MATLAB 源文件、3 张颗粒样本测试图片及 1 个测量结果 Excel 文件,开箱即用,无需额外配置。

关于项目
本项目为基于 MATLAB 的不规则颗粒图像分析系统,适用于农业种子、工业颗粒、矿物样本等领域的粒径测量、形态分析与自动计数。
项目背景
传统人工测量颗粒粒径效率低、误差大,本系统通过数字图像处理技术实现颗粒参数的自动化、批量化精准测量,提高检测效率与数据一致性。
作者信息
作者:Bob (张家梁)
项目编号:MI-1
原创声明:本项目为原创作品

开源协议
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
评论(0)