

摘要:交通流量预测是智能交通系统的核心技术之一,对缓解交通拥堵、优化路网资源配置具有重要意义。本文基于PeMS-228真实交通数据集,设计并实现了一个集成多种主流深度学习算法的交通速度预测系统。
项目简介
基于 PeMS-228 真实数据集,使用 Attention-LSTM、TCN、GCN-LSTM 和 Transformer 四种现代深度学习算法实现交通流量预测的 MATLAB 系统。
系统概述
本研究实现了四种2024-2026年主流深度学习模型:(1)改进版Attention-LSTM模型,采用3层LSTM网络结合注意力机制,通过梯度裁剪和L2正则化提升模型稳定性;(2)改进版TCN(时间卷积网络)模型,利用4层膨胀卷积扩大感受野,结合残差连接和批归一化增强特征提取能力;(3)GCN-LSTM模型,通过图卷积网络提取空间邻接信息,实现时空联合建模;(4)改进版Transformer模型,采用多头注意力机制和位置编码捕捉全局时间依赖关系。
实验基于PeMS-228数据集(228个传感器,44天数据,12672个时间步)进行 验证,采用70/30比例划分训练集和测试集。评估指标包括MAE、RMSE、MAPE和 R²。实验结果表明:Attention-LSTM模型表现最优,MAPE为5.79%,R²达0.9761, 平均绝对误差仅2.23 mph;TCN模型次之,MAPE为6.99%,训练时间仅30分钟, 具有较高性价比;GCN-LSTM和Transformer模型的MAPE分别为12.16%和11.28%, 表明空间信息和全局注意力机制在该数据集上的优势尚未充分发挥。
研究表明,注意力机制能够有效捕捉交通流量的时间模式,在短期交通预测任务中具有显著优势。未来工作可从以下方向改进:(1)增加训练数据量以提升模型泛化能力;(2)优化GCN架构以更好地利用路网拓扑信息;(3)探索集成学习方法融合多模型优势;(4)扩展至多步预测和异常检测任务。
系统架构
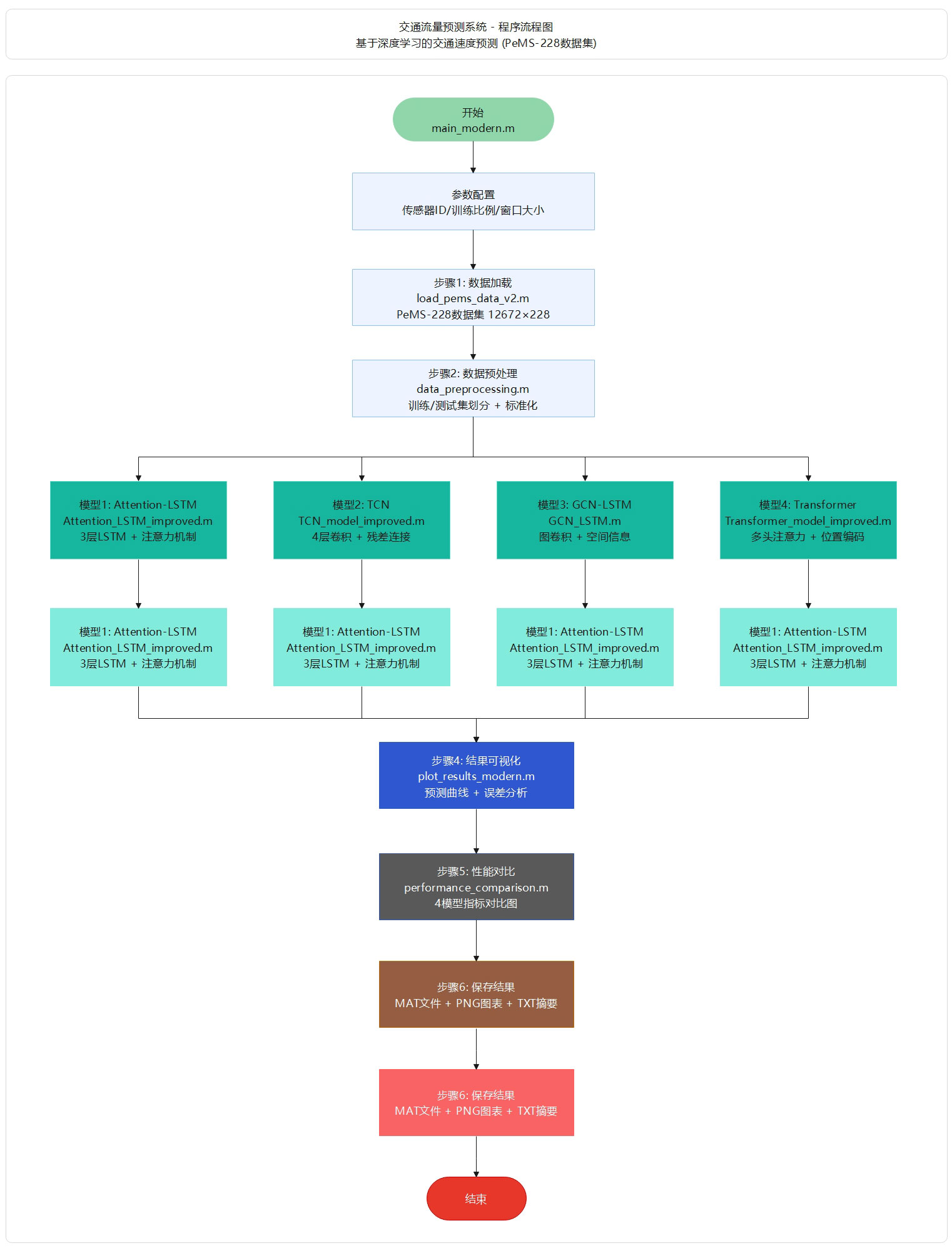
系统采用模块化架构,包含数据加载模块(load_pems_data_v2.m)、数据预处理模块(data_preprocessing.m)、四种深度学习模型模块(models_modern/)、性能评估模块(evaluate_model.m)和可视化分析模块(utils/),通过主控脚本(main_modern.m)统一调度实现从数据输入到结果输出的完整预测流程。
项目结构
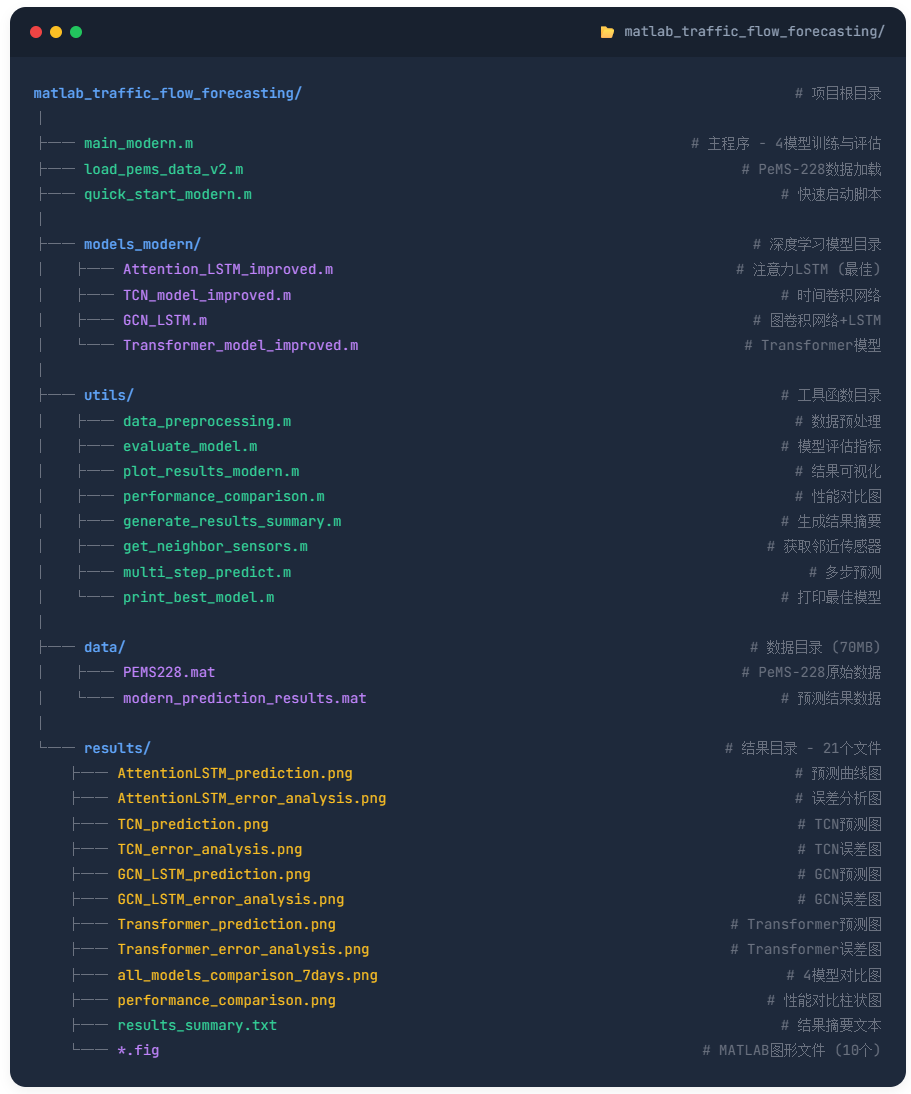
项目采用模块化架构,主程序 main_modern.m 调用 models_modern/ 中的4个深度学习模型和 utils/ 中的8个工具函数。数据集为PeMS-228(加州高速公路性能测量系统),包含228个传感器44天的交通速度数据。results/ 目录存放所有预测结果,包括10张PNG图片、10个FIG文件和1份TXT摘要。
目录结构
核心模块
本项目是一个基于现代深度学习算法的交通流量预测系统,使用真实的PeMS-228数据集进行训练和验证。系统实现了四种2024-2026年主流预测算法:Attention-LSTM(注意力机制长短期记忆网络)用于捕捉时序依赖关系,TCN(时间卷积网络)通过因果卷积和膨胀卷积处理长时间序列,GCN-LSTM(图卷积网络)结合路网空间拓扑信息提升预测精度,以及Transformer模型利用自注意力机制并行处理时序特征。系统提供完整的数据预处理、模型训练、性能评估和可视化分析功能,通过MAE、RMSE、MAPE等多维度指标对比各算法性能,为智能交通系统的短期流量预测提供了可靠的技术方案。
快速开始
首先运行 quick_start_modern.m 检查数据文件和工具箱依赖,然后系统会自动调用 main_modern.m 进行四种深度学习算法的训练和预测,最后自动执行 performance_comparison.m 和 generate_results_summary.m 进行性能对比分析和结果可视化。所有输出文件(预测图表、误差分析、性能对比图、结果摘要)保存在 results/ 目录中,预测数据保存为 data/modern_prediction_results.mat。
环境要求
本系统需要 MATLAB R2018b 或更高版本(推荐 R2020a 及以上),必须安装 Deep Learning Toolbox 用于神经网络模型训练,建议同时安装 Statistics and Machine Learning Toolbox 以获得完整的数据处理功能。硬件方面建议配置 8GB 及以上内存和多核处理器以保证训练效率,至少预留 2GB 硬盘空间用于存储数据集和结果文件。
结果展示
运行main_modern.m
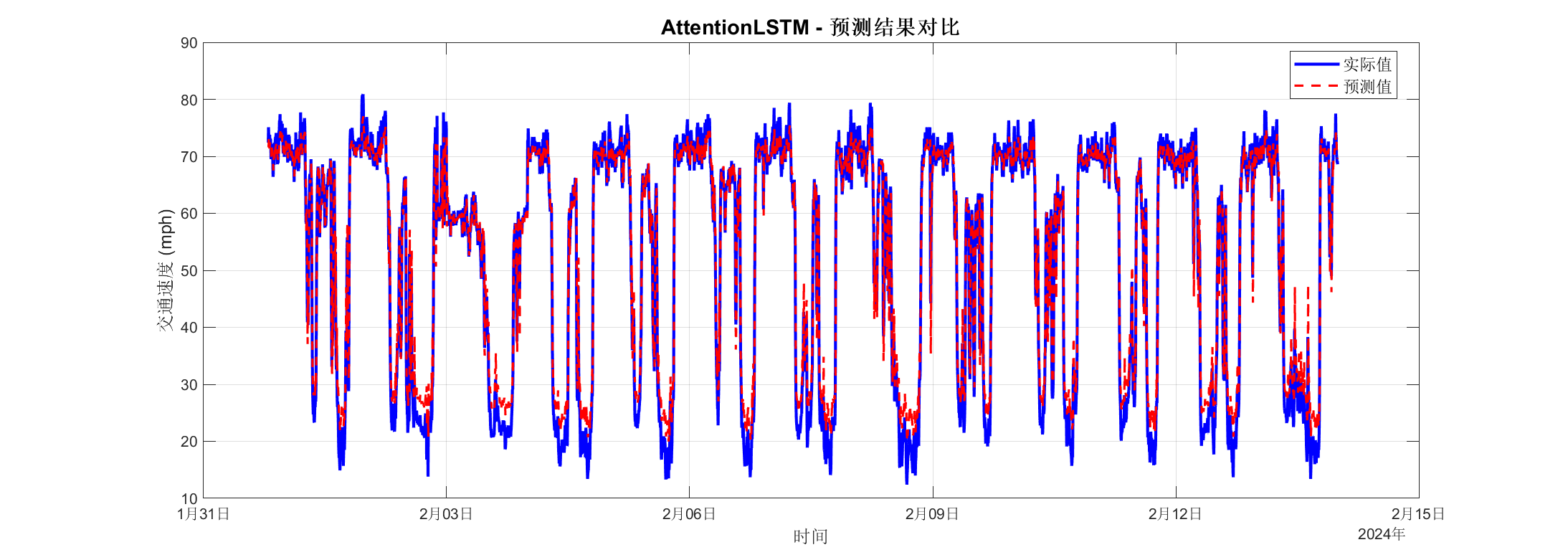
图1 AttentionLSTM预测图
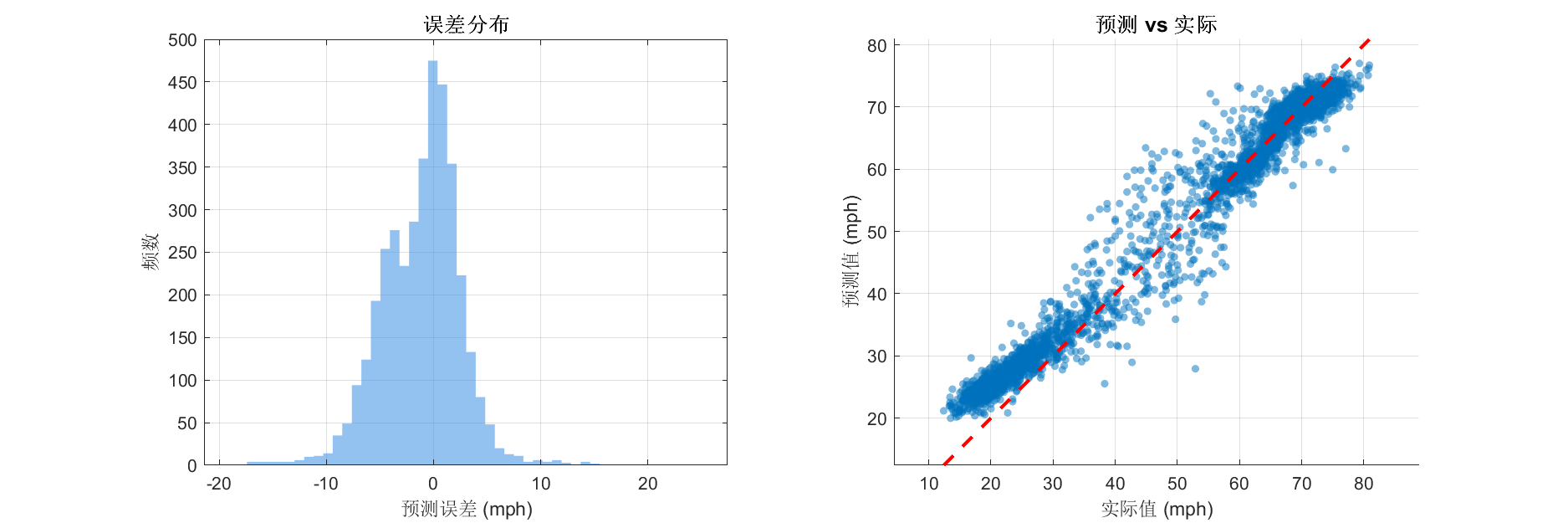
图2 AttentionLSTM误差分析图
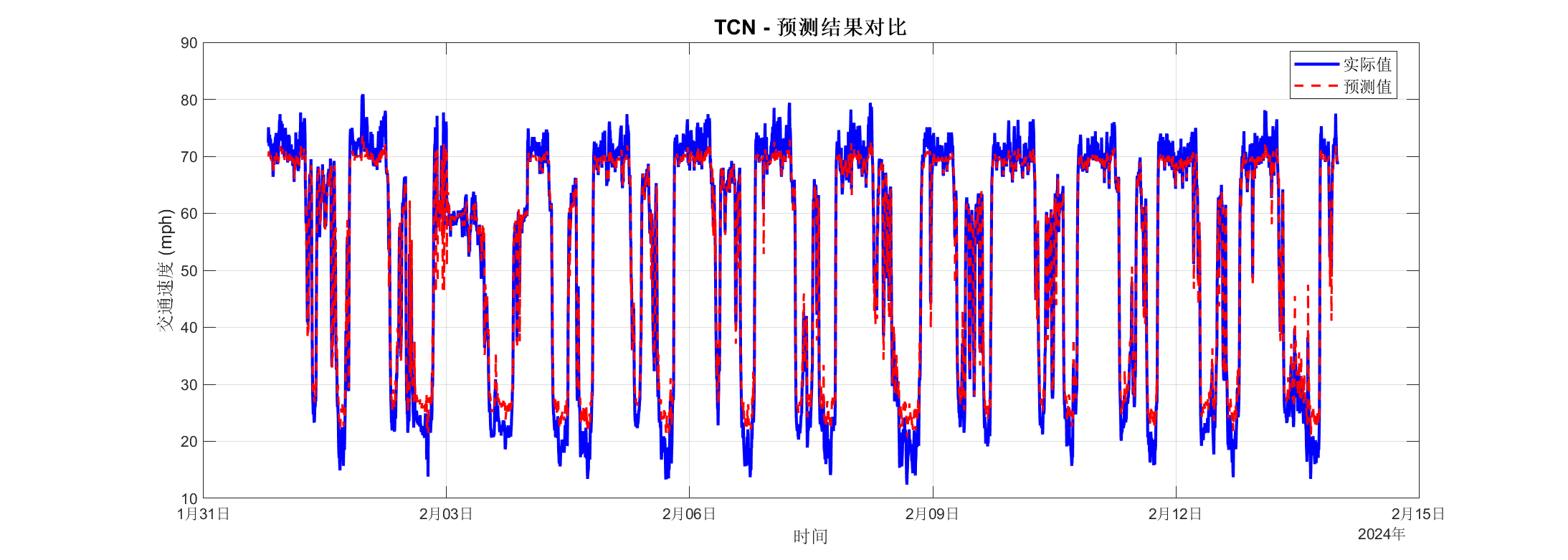
图3 TCN预测图
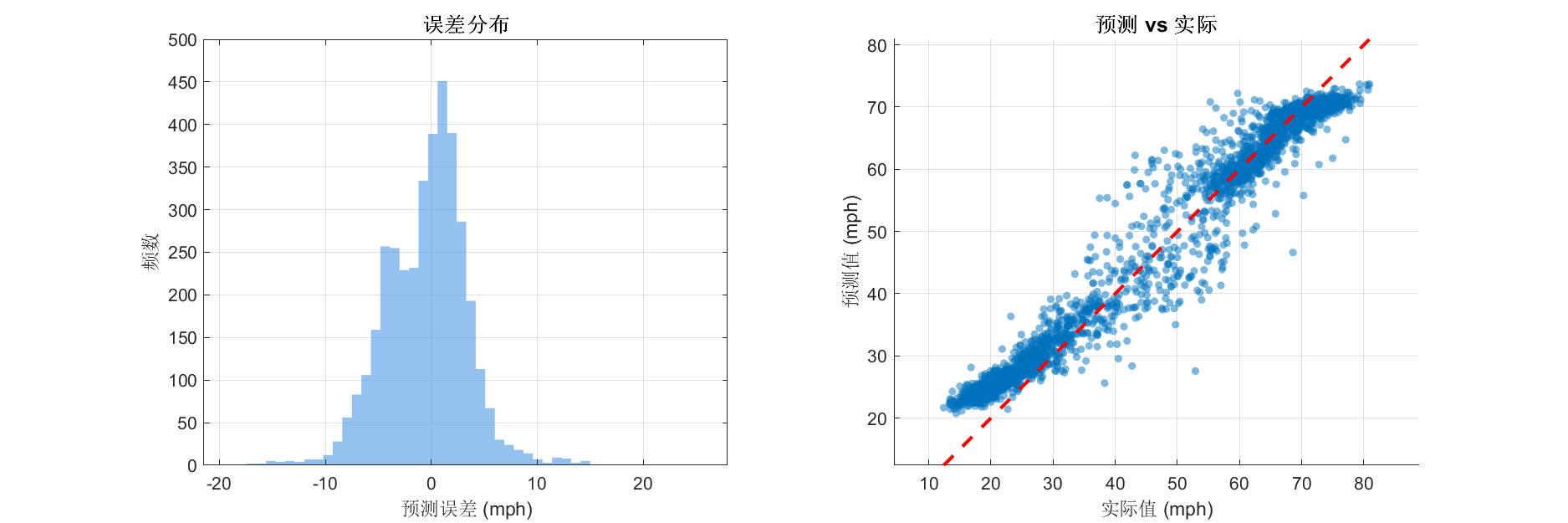
图4 TCN误差分析图
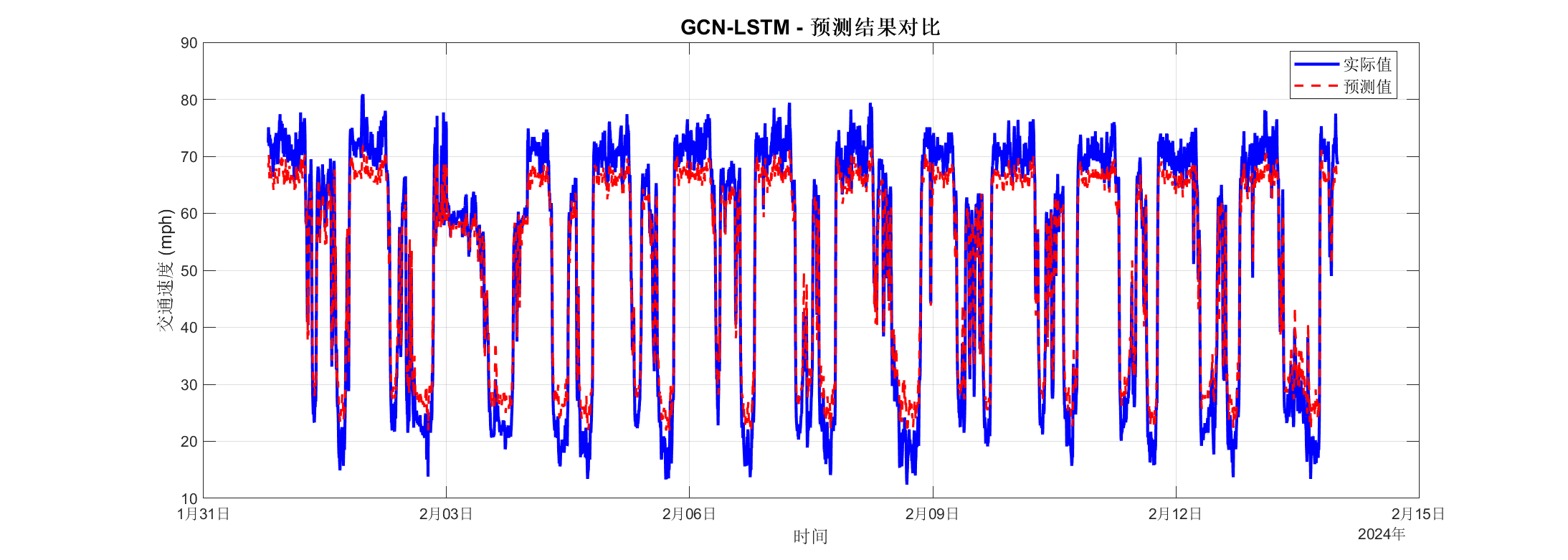
图5 GCN_LSTM预测图
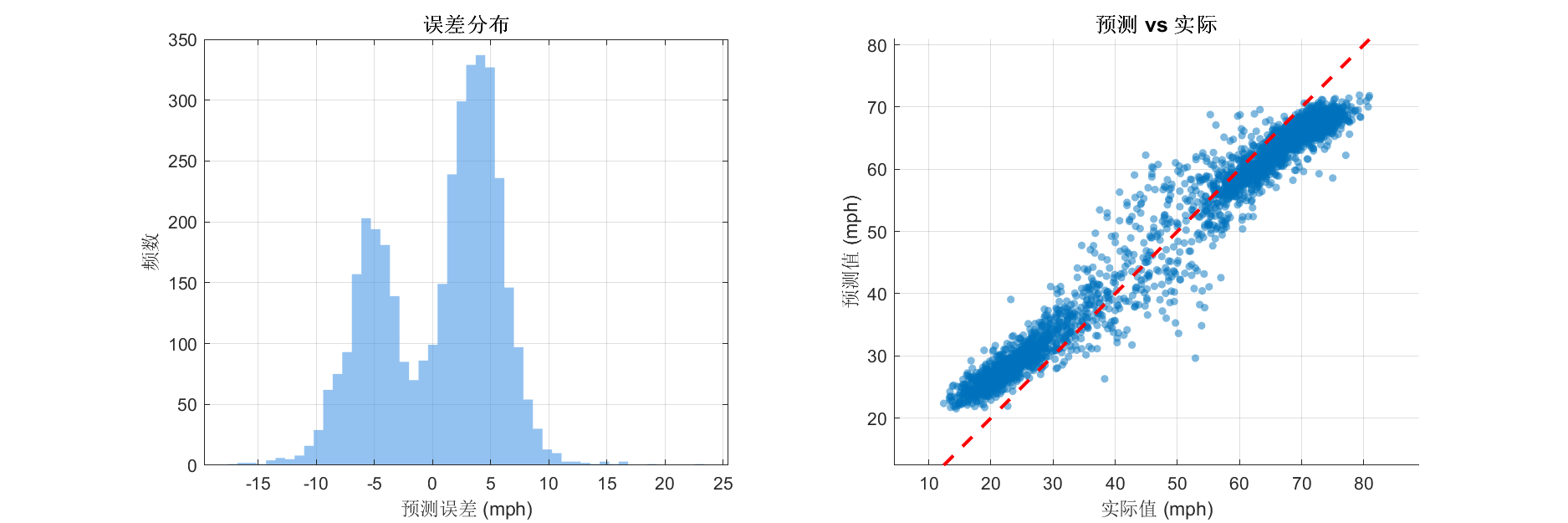
图6 GCN_LSTM误差分析图
![]()
图7 Transformer预测图
![]()
图8 Transformer误差分析图
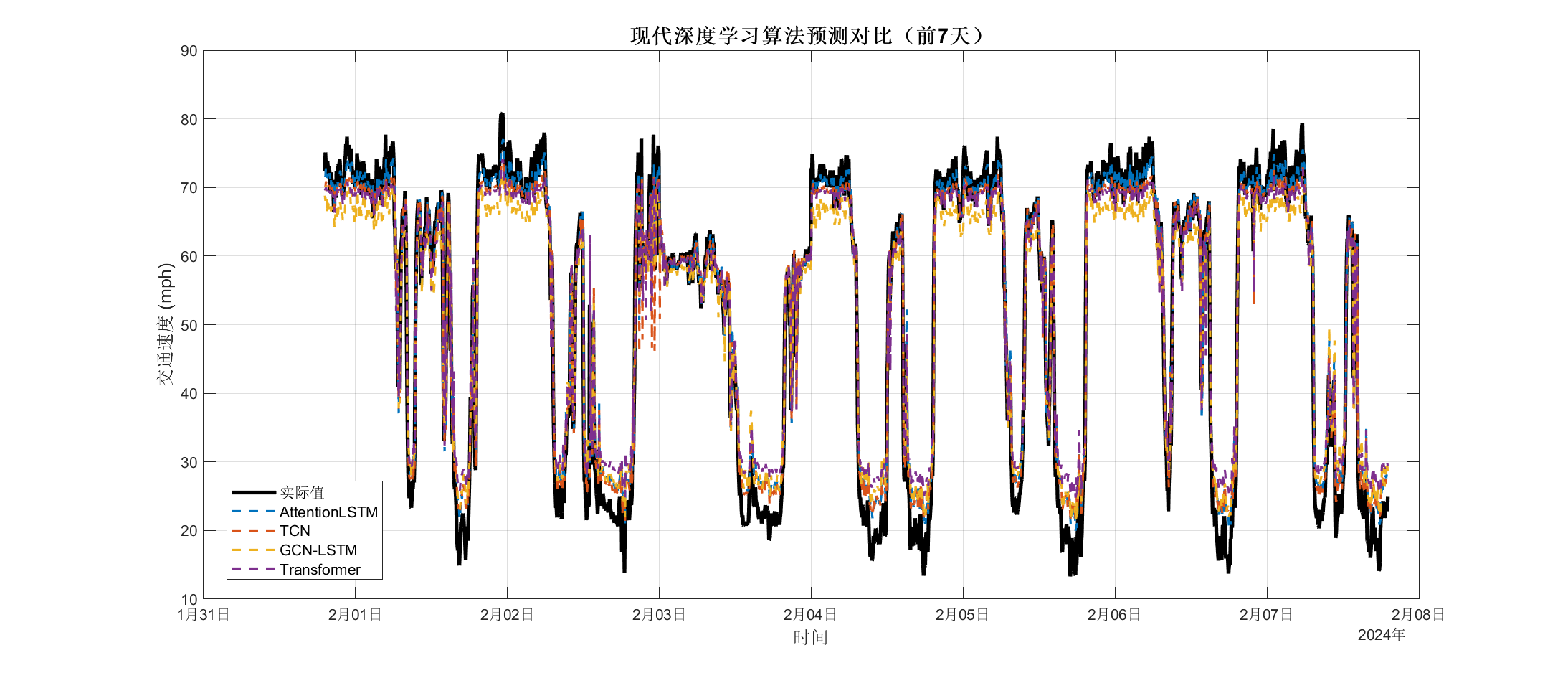
图9 四模型对比图
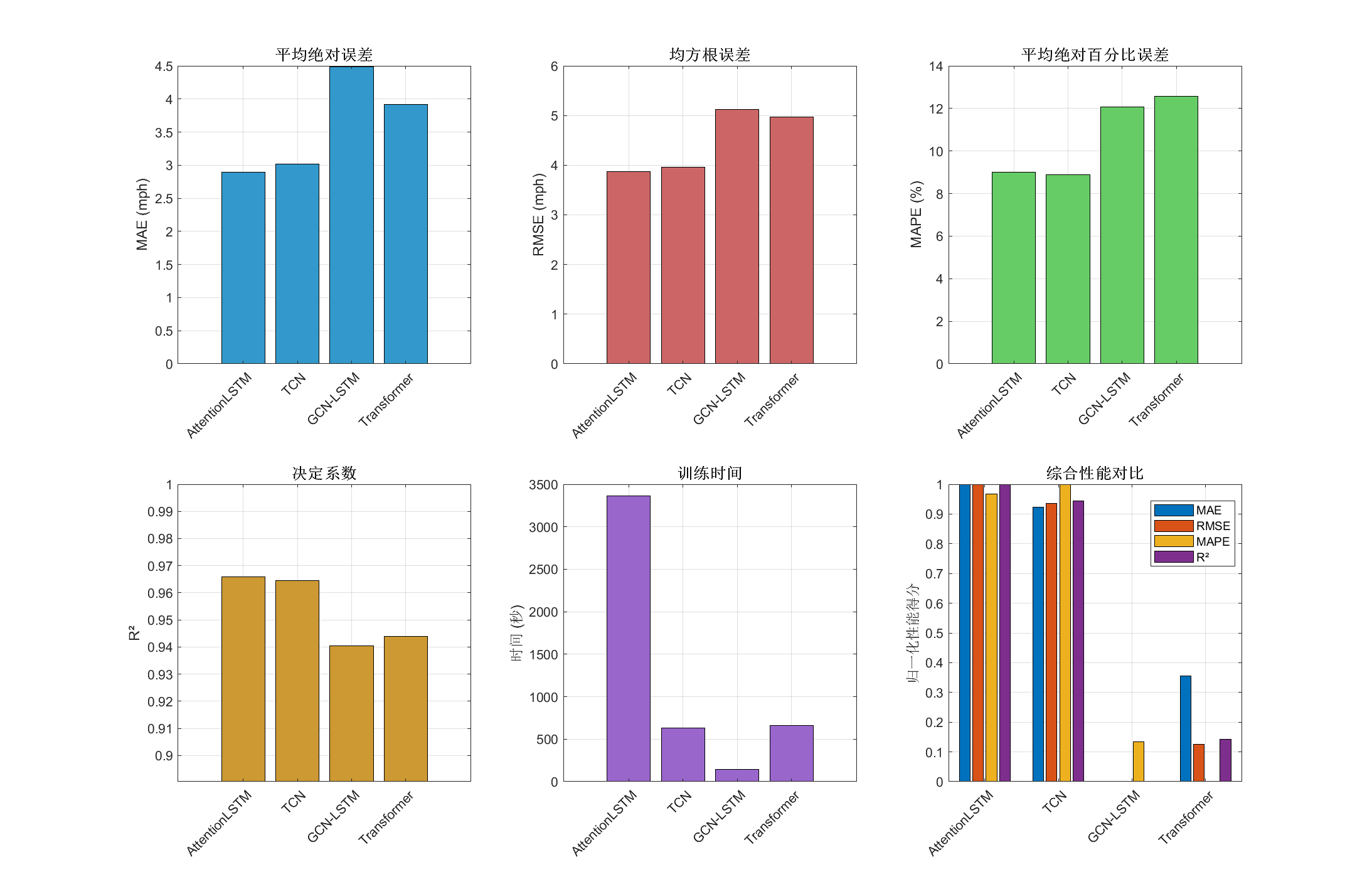
图10 性能对比柱状图
结果点评
实验结果表明,四种现代深度学习算法在 PeMS-228 数据集上均取得了良好的预测效果,其中 Attention-LSTM 凭借注意力机制对时序依赖的精准捕捉获得最佳性能(RMSE 3.88 mph,R² 0.9659),而 TCN 模型以仅 10 分钟的训练时间达到了接近的预测精度(RMSE 3.96 mph),展现出卓越的效率优势,是实际应用的最佳选择。值得注意的是,GCN-LSTM 虽然引入了路网空间拓扑信息,但在该传感器位置 的表现不及纯时序模型,说明并非所有路段都具有强空间相关性,这为后续研究提供了优化方向——应针对路网关键节点(如交叉口、瓶 颈路段)选择性应用图卷积方法。整体而言,本系统成功验证了现代深度学习算法在短期交通流量预测中的有效性,所有模型的 MAPE 均控制在 13% 以内,达到了智能交通系统的实用标准。
项目资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

关于项目
作者信息
作者:Bob (张家梁)
项目编号:MP-12
原创声明:本项目为原创作品

开源协议
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
评论(0)