编号:A197
大小:118M
环境:Python3.7、OpenCV4.5、dlib、Pycharm2020
简介:我采用的是:Realsense D435i 深度摄像头,使用深度摄像头测距的步骤:建一个深度流管、配置流和管道、开启流、创建流对象、对齐流、开启通道后将深度框与颜色框对齐、最后在通过.get_depth_frame()方法获取深度图。获取到深度图后,想要获得深度图上任意一点的距离,即将深度图图像转化为数组、提取点即为对应改点的深度。测量中心点的距离。代码注释的都比较详细
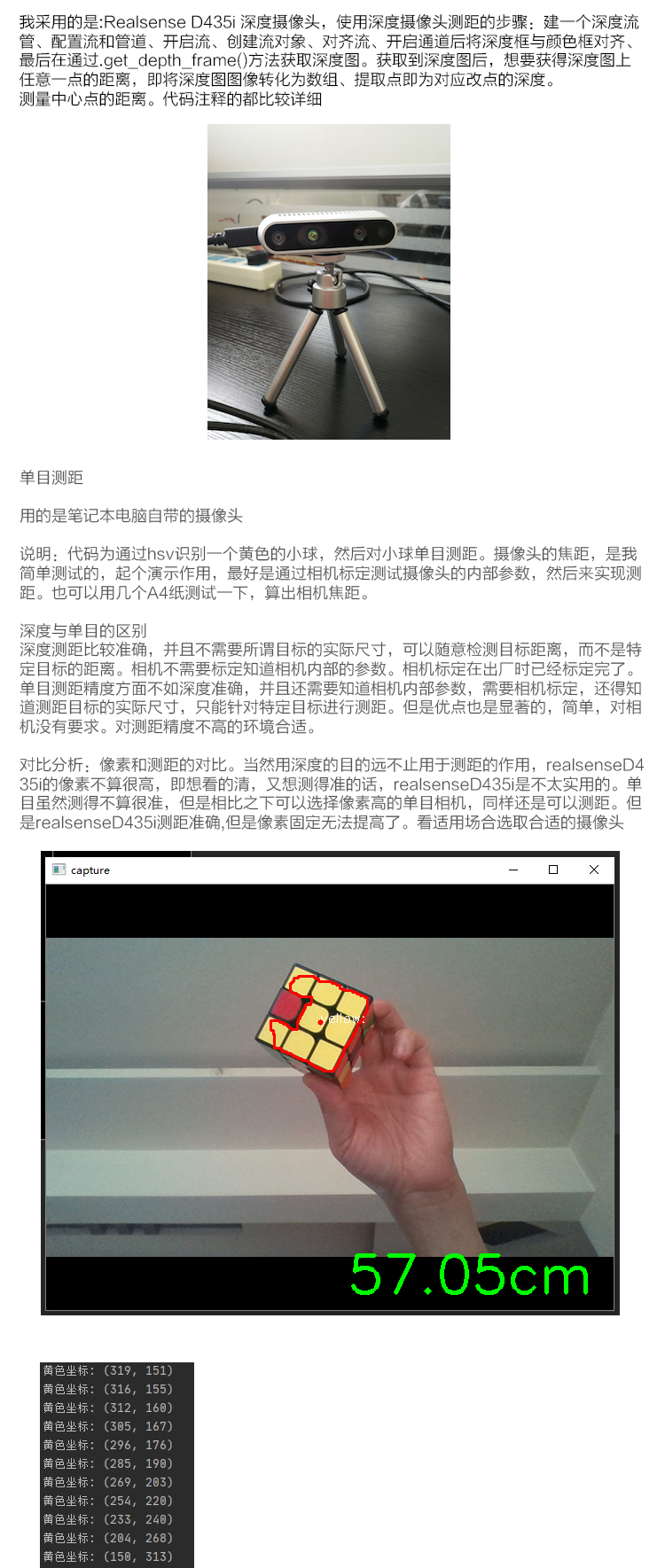
单目测距
用的是笔记本电脑自带的摄像头
说明:代码为通过hsv识别一个黄色的小球,然后对小球单目测距。摄像头的焦距,是我简单测试的,起个演示作用,最好是通过相机标定测试摄像头的内部参数,然后来实现测距。也可以用几个A4纸测试一下,算出相机焦距。
深度与单目的区别
深度测距比较准确,并且不需要所谓目标的实际尺寸,可以随意检测目标距离,而不是特定目标的距离。相机不需要标定知道相机内部的参数。相机标定在出厂时已经标定完了。单目测距精度方面不如深度准确,并且还需要知道相机内部参数,需要相机标定,还得知道测距目标的实际尺寸,只能针对特定目标进行测距。但是优点也是显著的,简单,对相机没有要求。对测距精度不高的环境合适。
对比分析:像素和测距的对比。当然用深度的目的远不止用于测距的作用,realsenseD435i的像素不算很高,即想看的清,又想测得准的话,realsenseD435i是不太实用的。单目虽然测得不算很准,但是相比之下可以选择像素高的单目相机,同样还是可以测距。但是realsenseD435i测距准确,但是像素固定无法提高了。看适用场合选取合适的摄像头。
运行展示
配套文件
我们提供完整项目文件清单如下:
文件目录
├ 1.项目源码
├ 2.运行截图
└ 3.演示视频
2. 分享目的仅供大家学习和交流,请不要用于商业用途!
3. 如果你也有好源码或者文档,可以与我们交换,分享有积分奖励和额外收入!
4. 本站提供的源码、文档等等其他资源,都不包含技术服务请大家谅解!
5. 如有链接无法下载、失效或广告,请联系管理员处理!
6. 本站资源售价只是赞助,收取费用仅维持本站的日常运营所需!
7. 如遇到加密压缩包,默认解压密码为"www.2zcode.com",如遇到无法解压的请联系管理员!
8. 因为资源和程序源码均为可复制品,所以不支持任何理由的退款兑现,请斟酌后支付下载
声明:网站内的所有源码都经过我们亲自测试,均可以正常使用.
索炜达.猿创 » 基于Python+OpenCV深度摄像头测距(D435i深度相机)
常见问题FAQ
- 免费下载或者VIP会员专享资源能否直接商用?
- 本站所有资源版权均属于原作者所有,这里所提供资源均只能用于参考学习用,请勿直接商用。若由于商用引起版权纠纷,一切责任均由使用者承担。更多说明请参考 VIP介绍。
- 提示下载完但解压或打开不了?
- 你们有qq群吗怎么加入?
