

摘要:相位恢复在光学成像中具有重要应用,通常通过幅度信息来恢复图像的相位。本文提出了一种基于迭代优化的相位恢复算法,旨在从已知幅度图像中估计相位。算法首先提取幅度信息并初始化随机相位估计值,通过傅里叶变换在频域中调整幅度并迭代更新相位,直到相位估计与真实相位匹配。实验结果表明,该方法能够有效恢复相位,并具有较高精度和稳定性,适用于光学成像和波前重建等应用。
项目信息
编号:MIP-1
大小:244K
作者:Bob(自研改进)
法律声明
由于源码产品具有可复制性,根据《中华人民共和国消费者权益保护法》相关规定,一旦完成购买和下载,本产品不支持退货或退款。请在购买前确认软件符合您的需求。如果对产品有任何疑问,请在购买前及时咨询客服(QQ 8872401)。
订单付款后,不支持取消和退款。购买数字资源前请谨慎,确保已详细了解产品内容。
如果源码需要远程部署,请及时联系我们的技术支持团队,我们将提供相应的技术支持,确保顺利使用。
环境配置
开发工具:Matlab R2020b、R2024b
操作系统:Windows 11
算法概述
Gerchberg-Saxton算法是一种经典的相位恢复算法,最早由Gerchberg和Saxton于1972年提出。该算法用于从幅度信息恢复相位信息,尤其在光学成像、衍射成像和相位重建等领域中应用广泛。它是一种基于迭代优化的算法,通过频域与空间域的交替更新来估计图像的相位。
在实际成像中,通常只能通过传感器获取图像的幅度(即光强分布),而相位信息是不可直接获取的。Gerchberg-Saxton算法利用已知的幅度信息,通过迭代优化的方式恢复图像的相位,进而能够重建完整的图像。它在光学、显微成像、粒子干涉等领域都有重要应用。
系统设计
本系统旨在实现了基于幅度和初始相位的迭代法来恢复图像的相位信息,最终输出提取的相位图像并保存为指定文件。
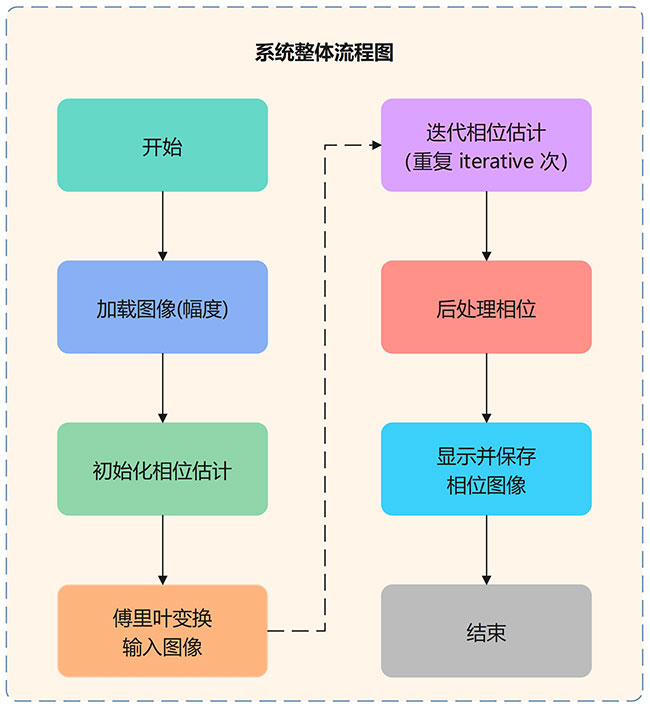
图1 系统整体流程图
该系统硬件配置如下,如果您的电脑配置低于下述规格,运行速度可能会与本系统的存在差异,请注意。
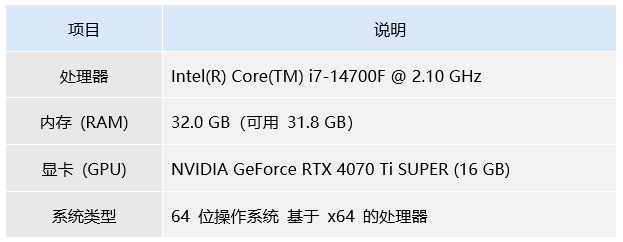
表1 电脑硬件配置
功能展示
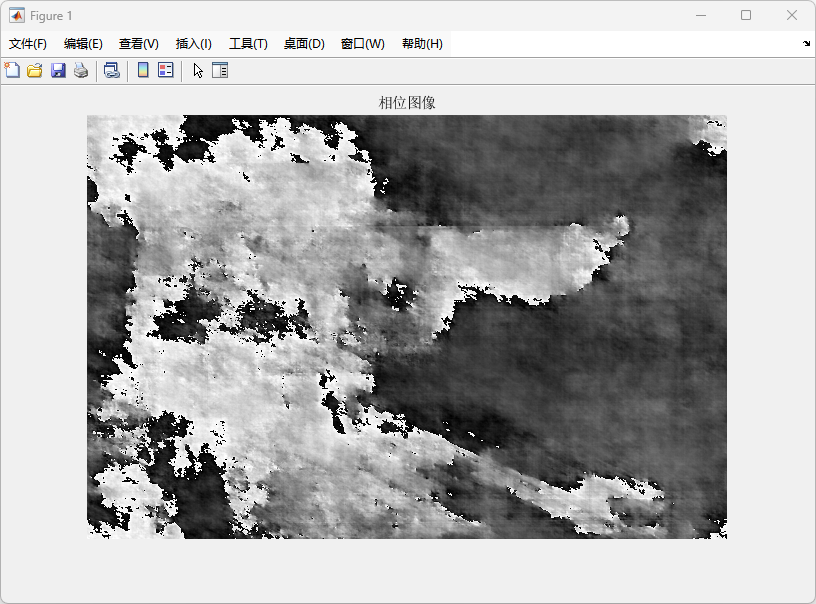
图2 运行结果 相位图像
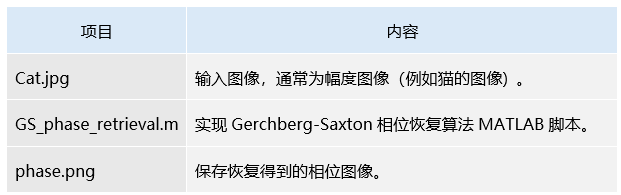
文件清单
服务项目
联系我们
官方声明
(1)实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
(2)版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由2zcode.Bob独立完成。未经2zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。
评论(0)